MEDICAL 4 - marzo 2014
IX
CALIBRAZIONE
nico ad anello chiuso che pilota gli scanner. Il controllo
degli azionamenti viene gestito da opportuni driver che
traducono la posizione X-Y su cui si vuole re-indirizzare il
fascio laser nella corrispondente posizione angolare degli
scanner. La posizione corrente viene gestita da un softwa-
re di controllo in maniera totalmente digitale e convertita
nel corrispondente segnale analogico, da fornire come
ingresso ai driver. Il sistema di controllo ad anello chiuso
garantisce che l’esatta posizione venga raggiunta dal fa-
scio laser (beam) in un tempo inferiore all’inverso della
frequenza a cui il laser viene generato.
Il sistema necessita dunque di almeno 2 specchi per re-
indirizzare il beam, uno per ognuno dei 2 assi X-Y. Altri
specchi possono essere presenti lungo il percorso ottico,
a seconda dell’orientazione del piano di lavoro (quello
focale, sul quale avviene l’operazione chirurgica) rispetto
alla sorgente laser (oltre a tutta una serie di altre ottiche
il cui scopo è focalizzare il beam a una determinata di-
stanza, rendere il fascio omogeneo in intensità e rotondo
nella sezione). In figura 1 è mostrato uno schema molto
semplificato del sistema descritto.
Stato dell’arte
A causa delle inevitabili imprecisioni nella meccanica e
nell’elettronica del sistema descritto in precedenza ac-
cade che, nel momento in cui si comanda al sistema di
descrivere con il laser un pattern ideale sul piano focale,
esso descriverà – inevitabilmente, nella realtà – qualcosa
di diverso.
Il sistema necessita cioè di una sorta di calibrazione, al
fine di correggere gli eventuali errori introdotti; la più
popolare e diffusa delle tecniche di calibrazione consiste
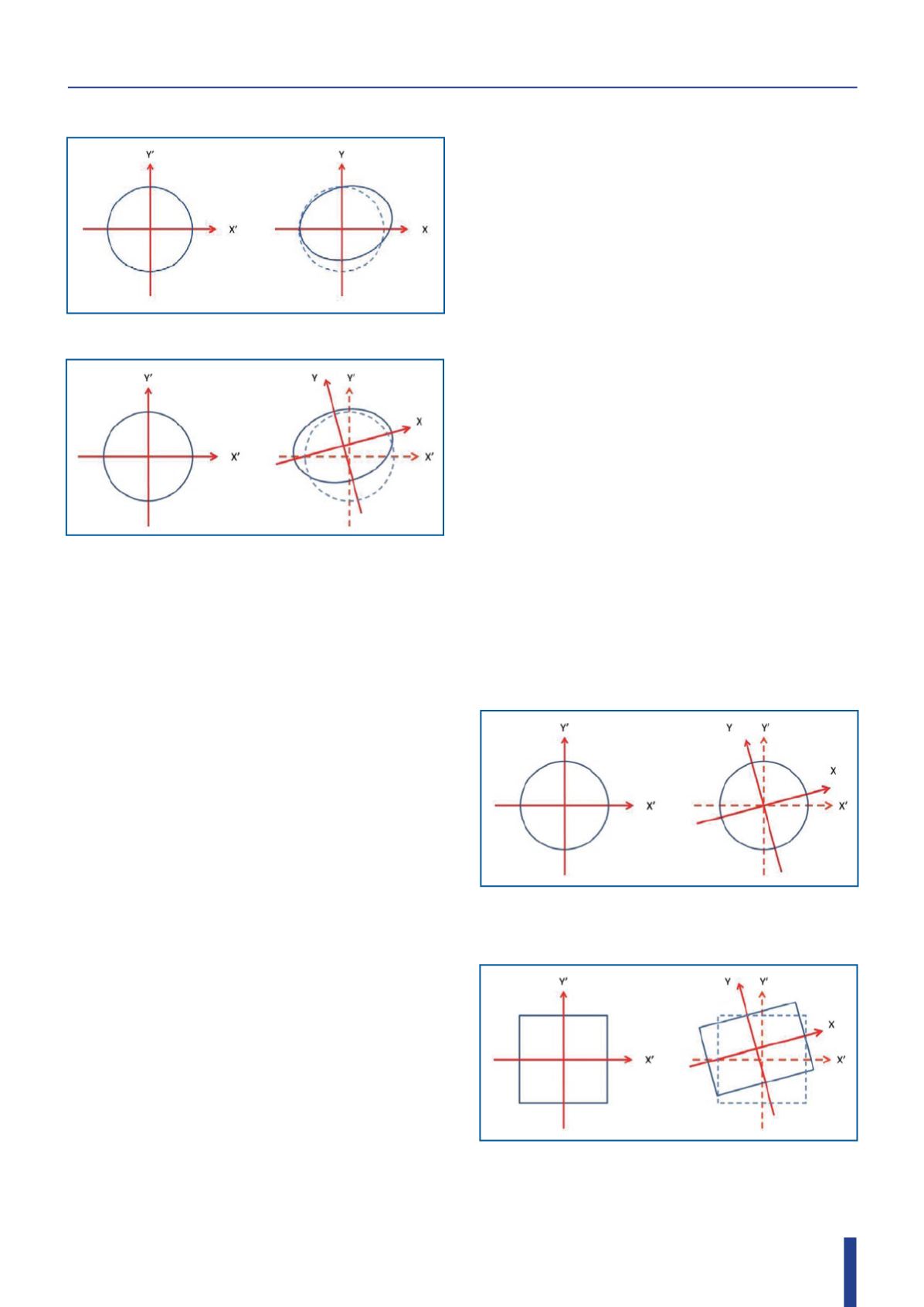
nel disegnare sul piano focale un cerchio. Nel processo di
conversione, a causa degli errori di cui sopra, il risultato
ottenuto è una sorta di ellisse (Fig. 2); la correzione tipica-
mente impiegata consiste nell’applicare (ad ambo gli assi
X e Y) un offset (al fine di centrare il pattern rispetto a un
riferimento noto) e un guadagno (gainX / gainY) al fine
di correggere l’aspect-ratio.
Questa tecnica è piuttosto errata perché non vi è alcuna
certezza che, una volta apportata la correzione, il pattern
risultante corrisponda a quello desiderato; ciò accade solo
nella situazione estremamente teorica in cui la meccanica
sia “perfetta” (ossia le cause delle distorsioni osservate sia-
no dovute alla sola parte elettronica).
Cosa ci si deve attendere qualora, nel mondo reale, la
meccanica non sia “perfetta”? In questo caso il pattern
risultante sarà ancora una sorta di ellisse, difficile da ca-
ratterizzare e correggere; infatti la forma circolare del pat-
tern di riferimento per la calibrazione viene scelta appo-
sta dalla maggior parte dei produttori di apparecchiature
laser allo scopo di mascherare imprecisioni dovute alla
meccanica, impossibili da correggere post assemblaggio
o sul campo.
Infatti il pattern circolare usato come riferimento nel pia-
no reale diventa, una volta eseguito dal sistema, una ellisse
sul piano reale, introducendo una rotazione del sistema
cartesiano di riferimento; quindi è chiaro come una cor-
Fig. 2 – Distorsione del pattern di calibrazione
Fig. 3 – Pattern circolare – Distorsione prima della
correzione
Fig. 4 – Pattern circolare – Distorsione dopo la
correzione (la rotazione degli assi non viene cor-
retta)
Fig. 5 – Pattern quadrato – Distorsione prima della
correzione


