53
- ELETTRONICA OGGI 434 - MARZO 2014
COMM
RFID
fattori ambientali quali multipath fading e interferenza fra let-
tori;
oltre una determinata soglia di velocità, il lettore non è in gra-
do di rilevare i tag posti su oggetti in movimento;
mutuo accoppiamento tra tag;
peggioramento delle prestazioni dovuto a un basso gua-
dagno dell’antenna del lettore in trasmissione e una ridotta
sensibilità del lettore in ricezione;
incapacità di trasmissione attraverso metallo, roccia, mu-
ratura o liquidi;
errato orientamento dei tag.
In tali casi, il ricorso a un sistema “RFID attivo”, in cui ogni tag
attivo sia dotato di una fonte autonoma di alimentazione a bat-
teria, permette di ottenere prestazioni decisamente superiori
a livello di comunicazione. Grazie all’alimentazione a batteria
e al conseguente aumento della portata, il tag è in grado di
sostenere trasmissioni ad alta potenza e di trasmettere senza
difficoltà persino in presenza di solide barriere in metallo o
muratura.
Tuttavia, proprio questo netto vantaggio dei tag attivi rappre-
senta al contempo il loro principale limite, in quanto i trasmet-
titori UHF ad alta potenza sono dispositivi a elevato consumo
energetico. In sostanza, la principale difficoltà di chi progetta
sistemi RFID attivi consiste nel coniugare eccellenti prestazio-
ni di trasmissione e una lunga durata della batteria (pur man-
tenendone le ridotte dimensioni e i costi contenuti).
In questo articolo, dopo la descrizione del funzionamento di
un sistema RFID con tag attivi, sarà presentata un’architettura
di riferimento che permetta di ottenere un’elevata potenza di
uscita RF e un ridotto consumo energetico del sistema.
Il funzionamento dei sistemi RFID attivi
In genere la tecnologia RFID attiva funziona a 455 MHz, 850
MHz, 900 MHz, 2,4 GHz o 5,8 GHz. È utilizzata in applicazio-
ni di tracciamento di persone e beni, controllo degli accessi,
ingresso passivo senza chiavi (PKE) nelle vetture, sistemi di
gestione dei parcheggi e monitoraggio della temperatura.
Come illustrato in precedenza, i tag RFID attivi hanno una po-
tenza di trasmissione superiore rispetto ai tag passivi. Un’al-
tra peculiarità dei sistemi RFID attivi è la capacità, grazie alla
presenza di una fonte autonoma di alimentazione a batteria,
di continuare a trasmettere a intervalli preimpostati la propria
identità e altri dati al lettore o a una stazione di base; tipica-
mente i tag sono configurati con un intervallo di trasmissione
di uno o due secondi. Rispet-
to a un sistema RFID passivo
in cui il tag passivo deve in-
nanzitutto ricevere una tra-
smissione da un lettore prima
di iniziare la trasmissione dei
dati, questa soluzione garanti-
sce al progettista del sistema
una flessibilità decisamente
superiore. In un sistema RFID
attivo, infatti, un tag può co-
municare la propria identità
a un lettore da una distanza
relativamente elevata (fino a
100 metri), perfino in presen-
za di ostacoli sul percorso di
ricezione del tag, ad esempio
per effetto di interferenze o di
una ridotta sensibilità dell’an-
tenna.
Tale tipologia di sistema com-
porta tuttavia un alto consu-
mo energetico poiché il tra-
smettitore UHF ad alta potenza deve entrare in funzione ogni
1-2 secondi.
Una soluzione alternativa prevede l’utilizzo di un tag attivo che
sia quasi sempre in modalità deep power-down; in tal caso il
sistema dovrà prevedere un ricevitore wake-up a bassa fre-
quenza (LF) che richieda la ricezione di un segnale in entrata
da un lettore posto nelle vicinanze prima di iniziare la trasmis-
sione UHF.
Le trasmissioni a bassa frequenza risentono in misura minima
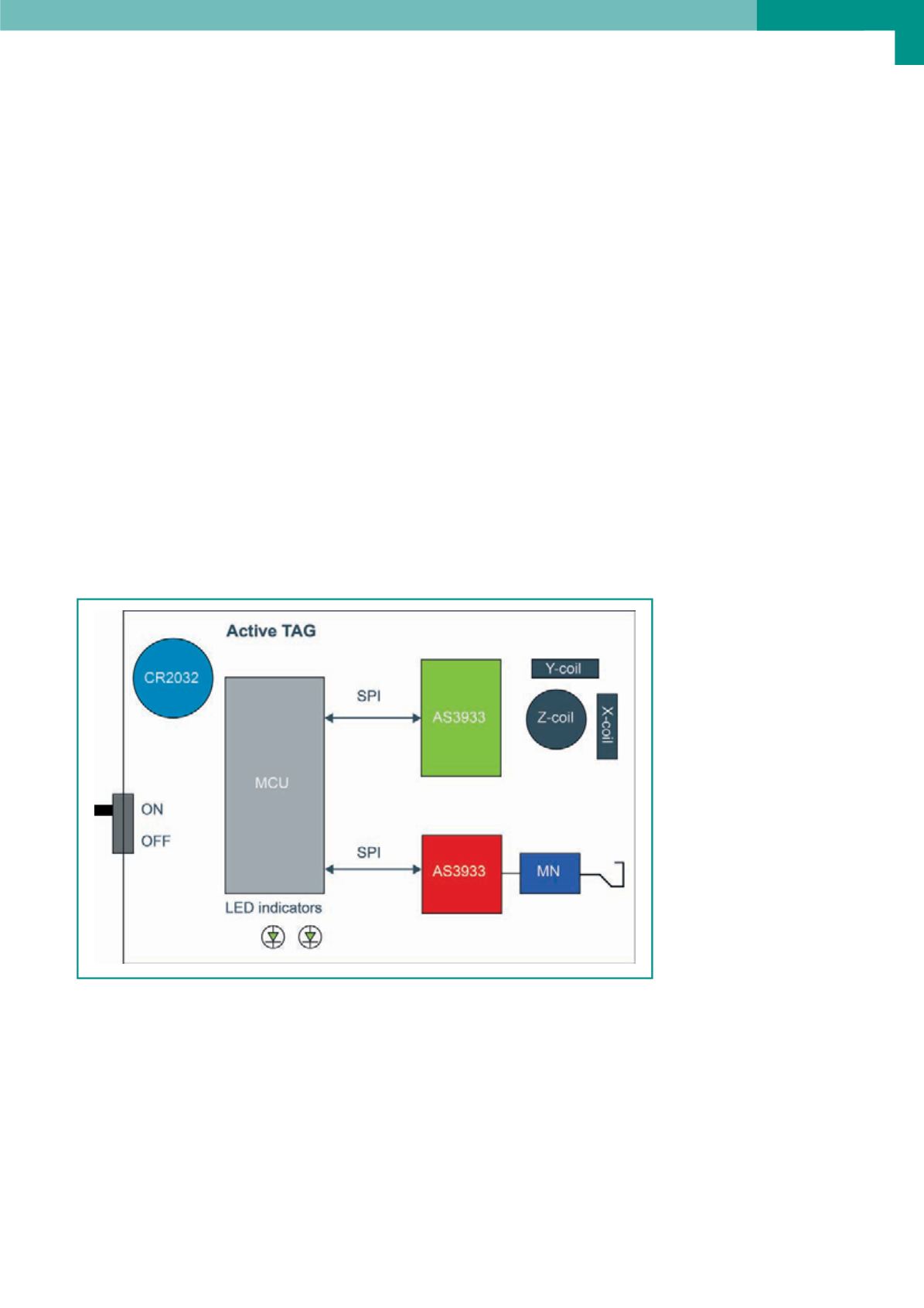
Fig. 2 – Architettura di riferimento del sistema RFID attivo di ams – diagramma a blocchi del tag attivo


