EMBEDDED
50 • NOVEMBRE • 2013
80
HARDWARE
FAN CONTROLLER
ricavare i valori di temperatura. I sen-
sori di temperatura digitali sono parti-
colarmente adatti per misure su lunga
distanza ma il loro costo è significati-
vamente superiore rispetto a quello
di un semplice diodo. Tra i numerosi
altri tipi di sensori disponibili si pos-
sono segnalare termocoppie – ideali
per il rilevamento della temperatura
ambiente – termistori e sensori di
temperatura digitali basati su PWM.
Un dispositivo SoC che integri fun-
zionalità analogiche e digitali pro-
grammabili permette l’interfaccia-
mento con qualsiasi tipo di sensore
di temperatura e, nel caso si utilizzi
un dispositivo di densità adeguata, è
possibile interfacciarsi con un numero
di sensori superiore rispetto a quello
consentito da qualsiasi MCU discreta
a funzioni fisse attualmente dispo-
nibile. Ciò consente al progettista o
all’architetto di sistema di focalizzare la propria attenzione sulle
funzionalità richieste piuttosto che sui dispositivi esistenti che
potrebbero essere in grado di soddisfare le loro esigenze al minor
costo possibile. Oltre a ciò, una volta rimossi i vincoli relativi al
numero di sensori di temperatura, è possibile integrare molti
più punti di rilevamento della temperatura nell’applicazione
considerata, in modo da avere una migliore comprensione delle
condizioni termiche e ottimizzare il posizionamento della ventola,
la velocità e gli algoritmi al fine di ridurre costo del sistema finale,
consumo di potenza e rumore acustico attraverso un controllo
ottimale della velocità della ventola.
Funzionalità di controllo avanzate
Il controllo della ventola, per ventole a 3 o 4 fili, viene solitamente
implementato tramite un’interfaccia PWM: regolando il duty
cycle del periodo della modulazione PWM è possibile modificare
la velocità effettiva della ventola. I sistemi con poche ventole,
meno di quattro per esempio, utilizzano MCU con periferiche
PWM integrate per controllare in modo indipendente le velocità
delle ventole e nel momento in cui il numero delle ventole supera
quello delle periferiche PWM disponibili, una singola interfaccia
PWM supporterà più ventole. Questa tecnica, anche se rappre-
senta lo standard “de facto” per il controllo delle ventole, limita
le funzioni di controllo e di ottimizzazione che sarebbe possibile
implementare mediante un controllo indipendente delle ventole.
Inoltre, per calcolare la velocità effettiva della ventola, ciascuna di
esse invia un segnale tachimetrico che deve essere interfacciato
con un timer o un contatore per determinare la velocità di rota-
zione (espressa in RPM o giri al minuto) della ventola. Anche se
in molte applicazioni non è necessario conoscere l’esatta velocità
di rotazione di una data ventola, questo
segnale è estremamente importante per
determinare l’arresto di una ventola oppu-
re il verificarsi o meno di un guasto che
provoca il blocco del rotore. Le soluzioni
basate su logica programmabile permet-
tono di eliminare i vincoli legati all’uso
della MCU e permettono di controllare
in maniera indipendente un numero mag-
giore di ventole rispetto a una qualsiasi
soluzione di tipo discreto. Oltre a ciò, la
possibilità di controllare e monitorare in
maniera indipendente ciascuna ventola
presente in un sistema consente di:
1) implementare un controllo della veloci-
tà ad anello chiuso basato su hardware o
circuiti logici;
2) ottimizzare la velocità di ciascuna ven-
tola, così come il rumore e il consumo
di energia, in modo che il sistema sia
in grado di mantenere la temperatura
prevista;
3) implementare algoritmi avanzati che permettono di prevedere
il guasto delle ventole e l’invecchiamento delle stesse basati sullo
“storico” relativo al duty cycle del segnale PWM e sulle analisi
della velocità di rotazione effettiva.
Il controllo della velocità ad anello chiuso basato su hardware o
circuiti logici si riferisce essenzialmente alla possibilità di utilizza-
re la logica programmabile per implementare una periferica PWM
e multiplare le uscite del tachimetro di una ventola in un blocco
di conteggio centrale che imposta e mantiene il duty cycle di ogni
ventola – tutto ciò in modo coordinato con un comando firmware.
Questa funzione è solitamente implementata nel firmware della
MCU che controlla ciascuna delle ventole oppure, più sempli-
cemente, non viene usata: in quest’ultimo caso il progettista del
prodotto finale spende parecchio tempo per caratterizzare il duty
cycle in funzione delle velocità delle ventole in modo da doversi
preoccupare solamente del duty cycle. Questo processo di carat-
terizzazione è lento e deve essere ripetuto per ogni nuova SKU o
progetto dell’applicazione finale.
Una soluzione basata su logica programmabile può implemen-
tare più periferiche PWM e contatori consentendo in tal modo
al progettista di realizzare un singolo PWM dedicato per ogni
ventola presente nel sistema e condividere una funzione di con-
teggio comune. Utilizzando una logica programmabile adeguata,
una funzione tachimetrica “intelligente”, in aggiunta alla utility
di conteggio, può misurare una velocità di rotazione desiderata
e regolare il duty cycle del PWM relativamente a ciascuna delle
funzioni PWM al fine di mantenere la velocità desiderata. Con
un’implementazione di questo tipo è possibile aggiungere funzio-
nalità non implementabili con un approccio di tipo classico, come
ad esempio il controllo di precisione della velocità della ventola
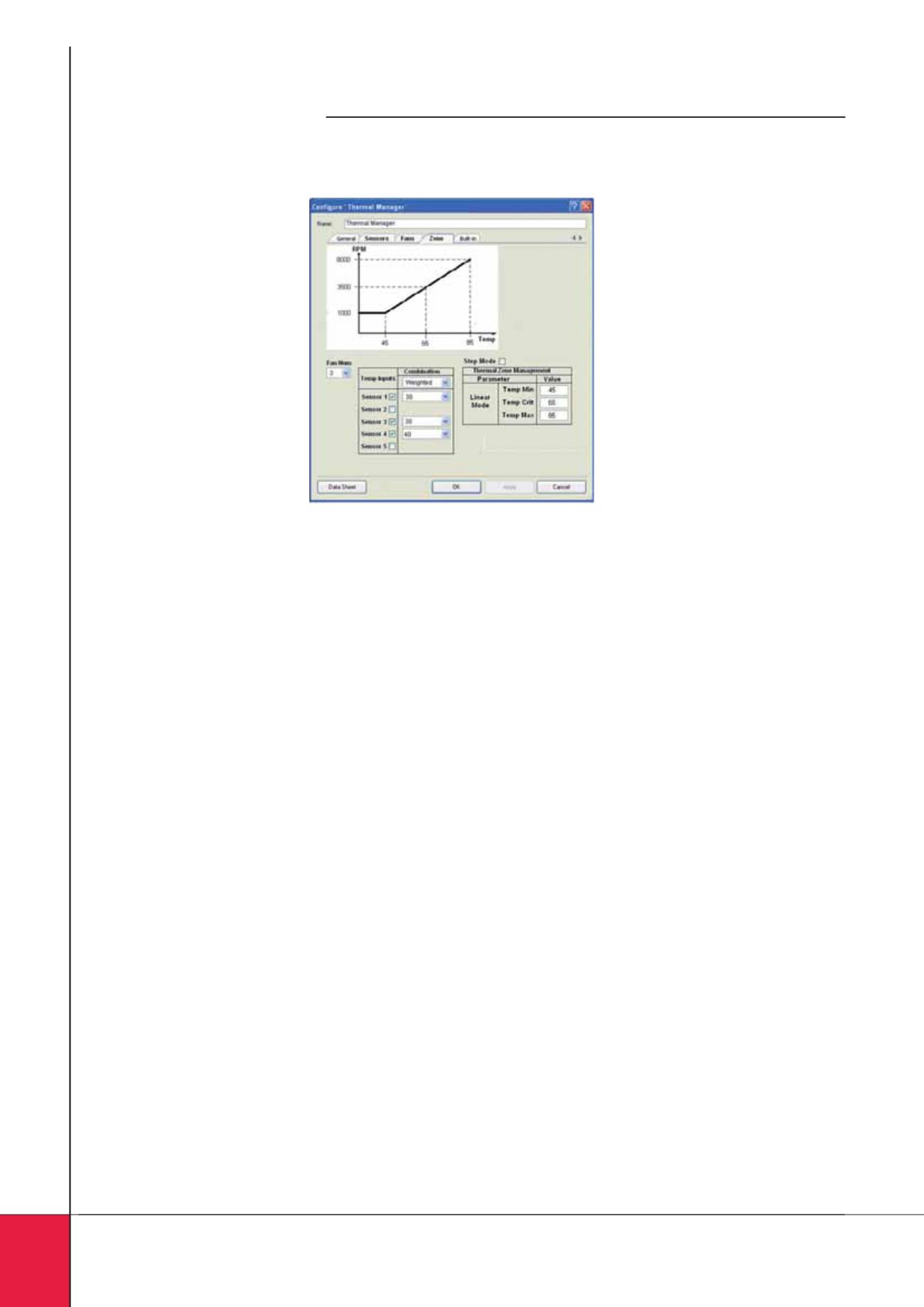
Fig. 2 – Componente per la gestione
termica di PSoC Creator


