
















 22 / 86
22 / 86

TECH INSIGHT
SWaP-C
22
- ELETTRONICA OGGI 460 - MARZO 2017
tipici sensori di immagini a colori. Gli spazi di colore
più comunemente usati all’interno dei sistemi di visio-
ne embedded sono:
•
Rosso, Verde, Blu (RGB) – Questo spazio di colori
contiene l’informazione RGB così come è prodotta
dal sensore di immagini, ed è comunemente usato
come un’uscita per interfacce semplici come la VGA.
•
YUV – Quest’ultimo contiene le informazioni di lumi-
nanza (Y) e di crominanza (U & V), ed è usato nella
maggior parte dei codec e in alcuni standard di di-
splay. I formati comunemente usati sono YUV4:4:4 e
YUV4:2:2. Con il formato 4:4:4 ciascun pixel è rappre-
sentato da otto bit realizzando un pixel da 24 bit. Con
un formato 4:2:2 i valori U e V sono condivisi fra i pixel,
consentendo di ottenere una profondità di pixel da 16
bit più efficiente in termini di occupazione di memoria.
Un’ulteriore decisione che ha un impatto considerevole
sulla catena di elaborazione dell’immagine e sullo SWaP-
C è la scelta di dove realizzare la maggior parte dell’ela-
borazione dell’immagine. Quest’ultima può avere luogo
all’interno dello stesso sistema di visione, il che consen-
te di ottenere una risposta più rapida, ma richiede anche
risorse maggiori di elaborazione e di memoria, portando
a requisiti maggiori di potenza. Quest’ultimo sarà l’ap-
proccio più comune per le applicazioni embedded come
i sistemi ADAS o di visione artificiale.
In alternativa, l’esecuzione dell’elaborazione su cloud
richiede che il sistema di visione embedded sia in gra-
do di catturare l’immagine e di trasmetterla usando la
tecnologia basata su rete. Questo approccio è adatto
per applicazioni quali l’elaborazione delle immagini
medicali o la ricerca scientifica, in cui l’elaborazione
può essere molto intensa e non sono richiesti risultati
in tempo reale.
Per realizzare la catena di
elaborazione, il cuore di un
sistema di visione embedded
richiede un’unità di elabo-
razione che sia in grado non
solo di controllare il sensore
di immagini selezionato, ma
anche di ricevere, eseguire
la sequenza di elaborazione
delle immagini e trasmettere
queste ultime su un’infrastrut-
tura di rete o al display sele-
zionato. Tali requisiti esigenti
spesso portano a scegliere un
FPGA o, come avviene nella
maggior parte dei casi, un Sy-
stem-on-a-Chip Interamente
Programmabile.
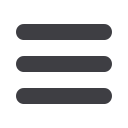
I SoC Interamente Program-
mabili Zynq di Xilinx combi-
nano due processori ARM A9 ad alte prestazioni con
una matrice FPGA. Il sistema di elaborazione (PS) può
essere usato per comunicare con un host attraverso
Gigabit Ethernet, PCIe o altre interfacce come CAN,
effettuando anche al contempo attività generali di ge-
stione ordinaria del sistema. La sezione a logica pro-
grammabile (PL) sfrutta la natura parallela della ma-
trice FPGA per ricevere ed elaborare le immagini in
modo estremamente efficiente.
Se le immagini devono essere trasmesse su rete, è pos-
sibile usare i controllori su chip per l’accesso diretto
alla memoria (DMA) per spostare in modo efficiente i
dati di immagine dalla logica programmabile alla me-
moria DDR del PS. Una volta all’interno della memoria
DDR del sistema di elaborazione, è possibile accedere
ai dati anche usando i controllori DMA del supporto
selezionato per il trasporto dei dati. Vale la pena di
notare che i processori A9 possono essere usati per
effettuare ulteriori elaborazioni sull’immagine all’inter-
no della DDR del PS, e che l’architettura Zynq consen-
te anche di spostare le immagini elaborate all’interno
della catena di elaborazione dalla DDR del PS alla PL,
assicurando così la massima flessibilità nella scelta
della strategia di elaborazione più efficiente.
La figura 2 illustra la stretta integrazione fra l’elabora-
zione, il controllo della memoria e le funzioni di inter-
faccia all’interno del dispositivo Zynq.
In conclusione, seguendo le linee guida sulla scelta
del sensore fornita nella prima parte della presente
serie di approfondimenti, questo articolo ha descrit-
to numerose tecnologie, ambienti e dispositivi che
possono essere usati per aiutare a soddisfare vincoli
stringenti di dimensioni, peso, consumo di potenza e
costi (SWaP-C) relativi ai sistemi di visione embedded
per applicazioni particolarmente impegnative.
Fig. 2 – Risorse di elaborazione delle immagini nei SoC Interamente Programmabili Zynq