ANALOG/MIXED SIGNAL
ToF
38
- ELETTRONICA OGGI 439 - SETTEMBRE 2014
contatore (sufficientemente veloce)
al primo impulso ricevuto, ciò che
comporta però il ricorso a un foto-
rivelatore ultraveloce di tipo SPAD
(Single-Photon Avalanche Diode). In
questo caso però il contatore, al fine
di garantire una precisione dell’ordi-
ne del millimetro, deve poter esse-
re in grado di rilevare impulsi della
durata di soli 6.6 picosecondi, cosa
che attualmente è pressoché impos-
sibile da garantire, se non operando
a basse temperature. Ecco perché si
preferisce integrare direttamente gli
impulsi ricevuti. La misura secondo
la tecnica a integrazione può essere
chiarita con la temporizzazione mo-
strata in figura 2, in cui si può vedere
come la luce riflessa produce degli
impulsi ritardati rispetto a quelli con
cui viene illuminata la scena. Per cia-
scun pixel, il processore ToF ricava
due segnali C1 e C2, proporzionali
alla differenza di fase fra gli impulsi
emessi dal diodo LED e quelli rice-
vuti dal sensore. Per aumentare la
precisione della misura viene calcolata la media tra più mi-
surazioni successive ravvicinate nel tempo. Il metodo appe-
na descritto può essere migliorato ricorrendo a una tecnica
detta “continuous wave”, in cui vengono ricavati non due
bensì 4 segnali differenza, grazie ai quali è possibile miglio-
rare la precisione del sistema, riducendo gli errori dovuti
alle variazioni di intensità della luce riflessa e di guadagno
del circuito di rilevamento. Inoltre, al fine di ottenere mag-
giori precisioni su un range di distanze più ampio, si adotta-
no tecniche multi-frequenza con interpolazione dei risultati.
Lo schema funzionale del sistema è visibile in figura 3.
Varie tecniche per un ampio range di impieghi
Sebbene Texas Instruments abbia optato per la Time-of-
Flight, vi sono tuttavia altre tecniche in grado di rilevare la
“spazialità” di una scena.
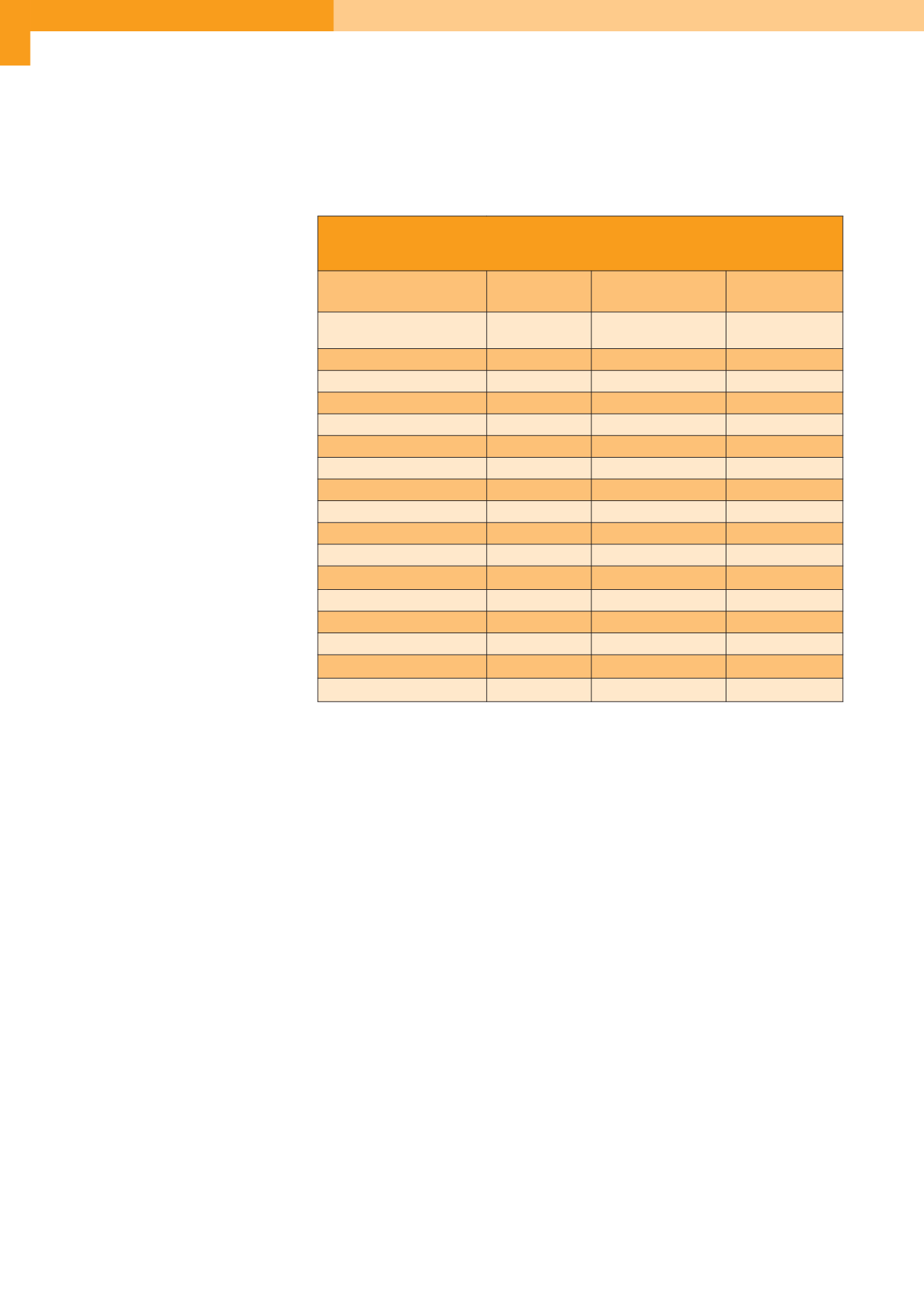
In tabella 1 vengono messi a confronto i loro principali para-
metri; come si vede, esse presentano caratteristiche e pre-
stazioni piuttosto differenti, e si prestano a impieghi specifi-
ci. La visione stereo (analogamente a quella umana) si basa
sul confronto fra due immagini ottenute tramite due teleca-
mere che inquadrano la scena da due posizioni differenti,
mentre la tecnica a “luce strutturata” si basa sull’impiego di
un pattern luminoso che viene proiettato sull’oggetto, e la
valutazione della forma dell’oggetto viene ottenuta analiz-
zando la distorsione introdotta sul pattern dalla particolare
geometria dell’oggetto stesso.
La tecnica ToF – che si sta imponendo grazie non solo alle
prestazioni ottenibili ma anche alla disponibilità di soluzio-
ni economiche e ben supportate – si presta a molteplici ap-
plicazioni, che vanno dal settore industriale all’automotive,
dall’healthcare al gaming, dall’advertising alla modellazione
3D.
Nel settore industriale, ad esempio, nell’interazione fra ope-
ratore e robot può essere proficuo un controllo di tipo ge-
stuale.
Nell’advertising, è possibile pensare a schermi sensibili al
passaggio delle persone, le quali possono interagire con le
immagini e con la disposizione o il contenuto degli oggetti
visualizzati. Nell’entertainment, il controllo gestuale risulta
ottimale nel gaming, nella realtà virtuale e nelle smart-TV,
così come nell’automobilistica è possibile immaginare ad
esempio il controllo delle funzioni audio semplicemente a
gesti, senza distrazione del guidatore nella ricerca e nell’in-
terpretazione di tasti e pulsanti vari. Non solo, ma la ToF
può essere utilizzata per aumentare la sicurezza della guida
rilevando la presenza di persone e autovetture nella vici-
nanza del proprio veicolo, anche nell’oscurità. Ancora, nella
stampa 3D la tecnica ToF può essere usata par la scansione
tridimensionale degli oggetti da replicare.
Q
Tabella 1 – Confronto fra le tre principali tecnologie digitali
in grado di rilevare la spazialità di una scena
Parametro
Visione
stereoscopica
Luce
strutturata
Time-of-Flight
Principio
di funzionamento
Due sensori
distanziati
Pattern con rilevamento
della distorsione
Misura del tempo
di ritorno della luce
Complessità software
Elevata
Media
Bassa
Costo dei componenti
Basso
Elevato
Medio
Compattezza
Scarsa
Elevata
Bassa
Tempo di risposta
Medio
Lento
Rapido
Precisione della misura
Bassa
Elevata
Medio
Prestazioni a bassa luminosità
Scarse
Buone
Buone
Prestazioni ad alta luminosità
Buone
Scarse
Medie/buone
Assorbimento di potenza
Basso
Medio
Medio
Range di misura
Limitato
Regolabile
Regolabile
Risoluzione
Variabile
Elevata
QVGA
Impieghi
Localizzazione
Sì
Sì
Sì
Identificazione
Sì
Sì
Sì
Ispezione e misura
Sì
Sì
Sì
Biometriche
Sì
UI control/gaming
Sì


