

















 47 / 92
47 / 92

47
EMBEDDED
66 • NOVEMBRE • 2017
IMAGE PROCESSING |
HARDWARE
•
}
"
-
ne ed è usata per rimuovere elementi di un oggetto.
•
#
"
una dilatazione seguita da un’erosione ed è usata
quando vogliamo rimuovere piccoli elementi dello
sfondo.
Una volta che abbiamo l’immagine all’interno del
formato desiderato, ad es. aperta o dilatata e così
via, possiamo cercare elementi strutturati all’in-
terno dell’immagine ed elaborarli di conseguenza.
Finora, gli algoritmi qui sopra presentati hanno
-
versi sistemi di visione embedded producono im-
magini con una velocità elevata di fotogrammi. Ciò
consente di usare le immagini per il rilevamento
del movimento e l’inseguimento degli oggetti, ed è
particolarmente importante in applicazioni come
À
} }! &
rilevamento del movimento usano numerose tec-
niche per rilevare e inseguire il movimento in una
sequenza di immagini. Queste possono essere ba-
sate su un confronto effettuato pixel per pixel o su
7
-
levamento del movimento porta con sé le sue cri-
ticità, ad esempio il fatto che l’illuminazione della
scena possa variare lungo le sequenze di immagini
analizzate o che l’interazione fra gli oggetti possa
essere complessa. Una volta che l’immagine è sta-
ta elaborata e contiene le informazioni richieste, lo
stadio successivo della catena di elaborazione delle
immagini consiste nell’analisi delle informazioni e
"
-
laborazione basata sulla presa di decisioni all’in-
terno di un sistema di visione embedded richiede
tipicamente un software per eseguire gli algoritmi
e quindi intraprendere azioni opportune basate
}
-
} }!
conducente della presenza di un ostacolo all’interno
di un punto cieco o l’avviso al conducente in caso
di colpi di sonno, se è in esecuzione un applicativo
"
-
tena di elaborazione delle immagini è tipicamente
`&}
sua natura parallela, mentre la presa di decisioni
è effettuata all’interno di un processore stretta-
9
!Y
on Chip, che combina la logica programmabile con
processori ad alte prestazioni, si presta idealmente
per le applicazioni di elaborazione delle immagini.
Miglioramento dell’immagine: un esempio
Un esempio di miglioramento dell’immagine che
essere facilmente creato usando il kit di visione
}J^O \
#?[! `Y *|>># [^ !
-
!Y
# Y 9
Xilinx. Usando l’EVK possiamo creare facilmente la
catena di elaborazione delle immagini, che include
una funzionalità di miglioramento delle immagini
7`
-
7`
\
7`
una catena di elaborazione delle immagini all’inter-
`"
Y 9
`! Y 9
À
-
borazione delle immagini. Questo esempio farà uso
anche delle porte di interconnessione ad alte presta-
`!
`"
l’immagine possa essere archiviata nella memoria
_
`! #
`!
-
cedere ai contenuti dell’immagine e, se lo si deside-
ra, effettuare ulteriori elaborazioni dell’immagine e
algoritmi di analisi.
"
immagini che andremo a realizzare userà i blocchi
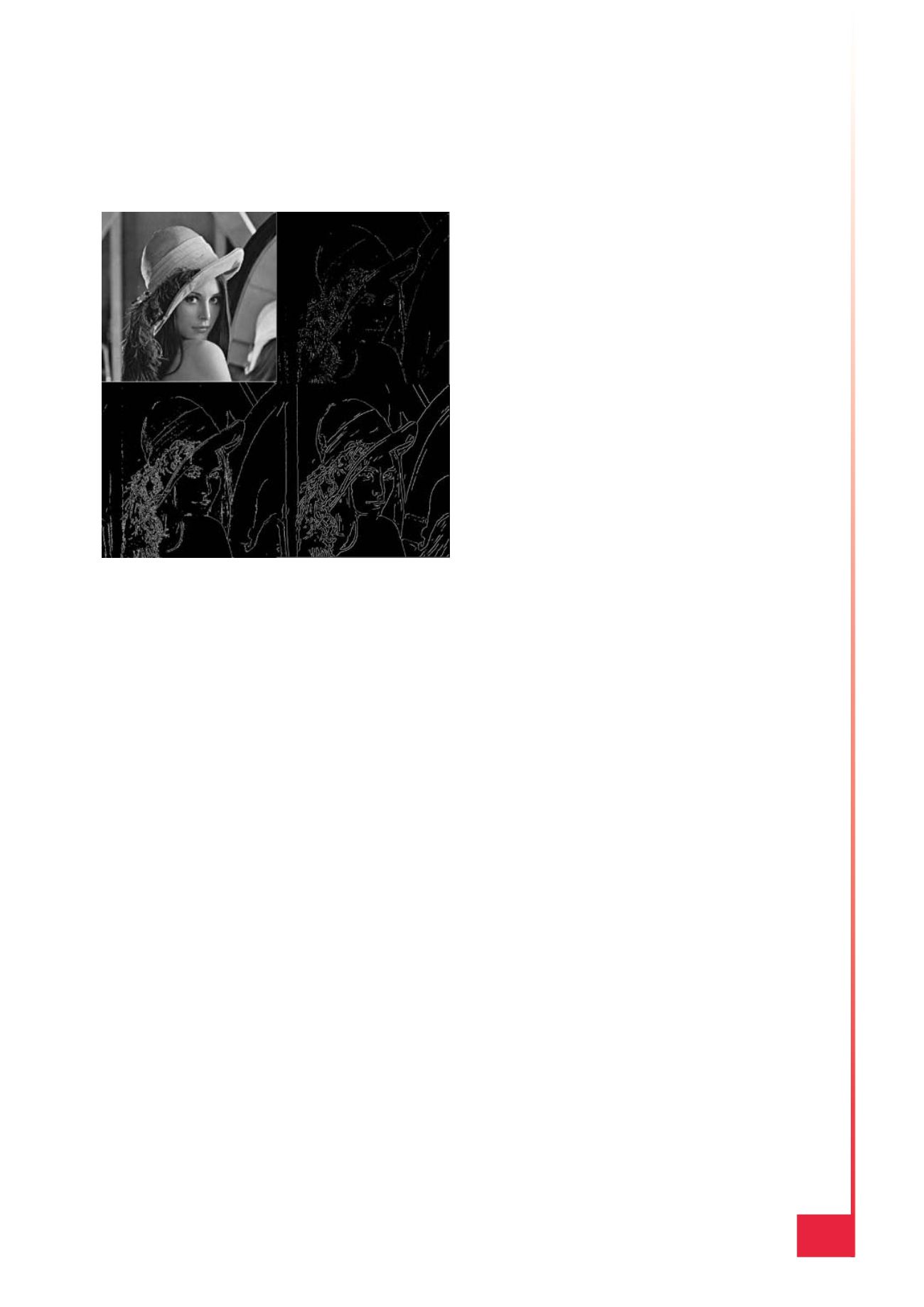
Fig. 6 – Algoritmi di rilevazione dei contorni, in
senso orario: Originale, Laplaciano di Gaussiano,
Canny e Sobel