

















 45 / 92
45 / 92

45
EMBEDDED
66 • NOVEMBRE • 2017
IMAGE PROCESSING |
HARDWARE
Filtri di immagine
Essendo l’informazione all’interno di un’immagine
contenuta nel dominio spaziale e non nel dominio
9
À
-
À
7
altri termini, noi convolviamo l’immagine con un’u-
À
risposta desiderata. Come con la convoluzione mo-
nodimensionale, dobbiamo considerare la risposta
À
-
zione delle immagini quest’ultima è chiamata “fun-
zione di distribuzione dei punti”. Per controllare la
À K
-
U À
`!
-
sura per ciascuna funzione, proprio come avremmo
À
À
elaborazione dei segnali ad es, passa-alto, passa-
basso e così via.
`
À
-
Z
all’interno dell’implementazione abbiamo bisogno
di memorizzare temporaneamente le linee, di modo
À
-
À
"
-
À
può richiedere una grande quantità di calcoli, dato
Z
À
-
À
` 9
`! À
matrice bidimensionale ad es. 3x3, 5x5 o 7x7 e così
via. Questo riduce il numero di moltiplicazioni ri-
K 9
U
`&} O
`!
-
di dimensioni, possiamo implementarlo ricorrendo
O } À
-
À
-
ri circostanti al pixel centrale per produrre un va-
lore aggiornato del pixel centrale. Esempi di questa
À
-
la media, che sono comunemente usati per la ridu-
7
potrebbe essere una delle prime aree che desideria-
mo considerare all’interno della catena di elabora-
zione, prima di elaborare ulteriormente l’immagi-
7
9
per assicurare che l’immagine sia correttamente
O
-
razioni potrebbero essere la rimozione del rumore
dall’immagine o la realizzazione di miglioramenti
À
-
ti all’interno dell’immagine.
7
contorni è diverso dalla funzione di rilevazione
-
tà di rilevare i contorni all’interno dell’immagine
potremmo dapprima voler far girare un algorit-
mo di miglioramento dei contorni prima dell’algo-
!
correggere un’immagine per il rumore, potremmo
À
-
xel centrale, i suoi pixel circostanti e sostituisce
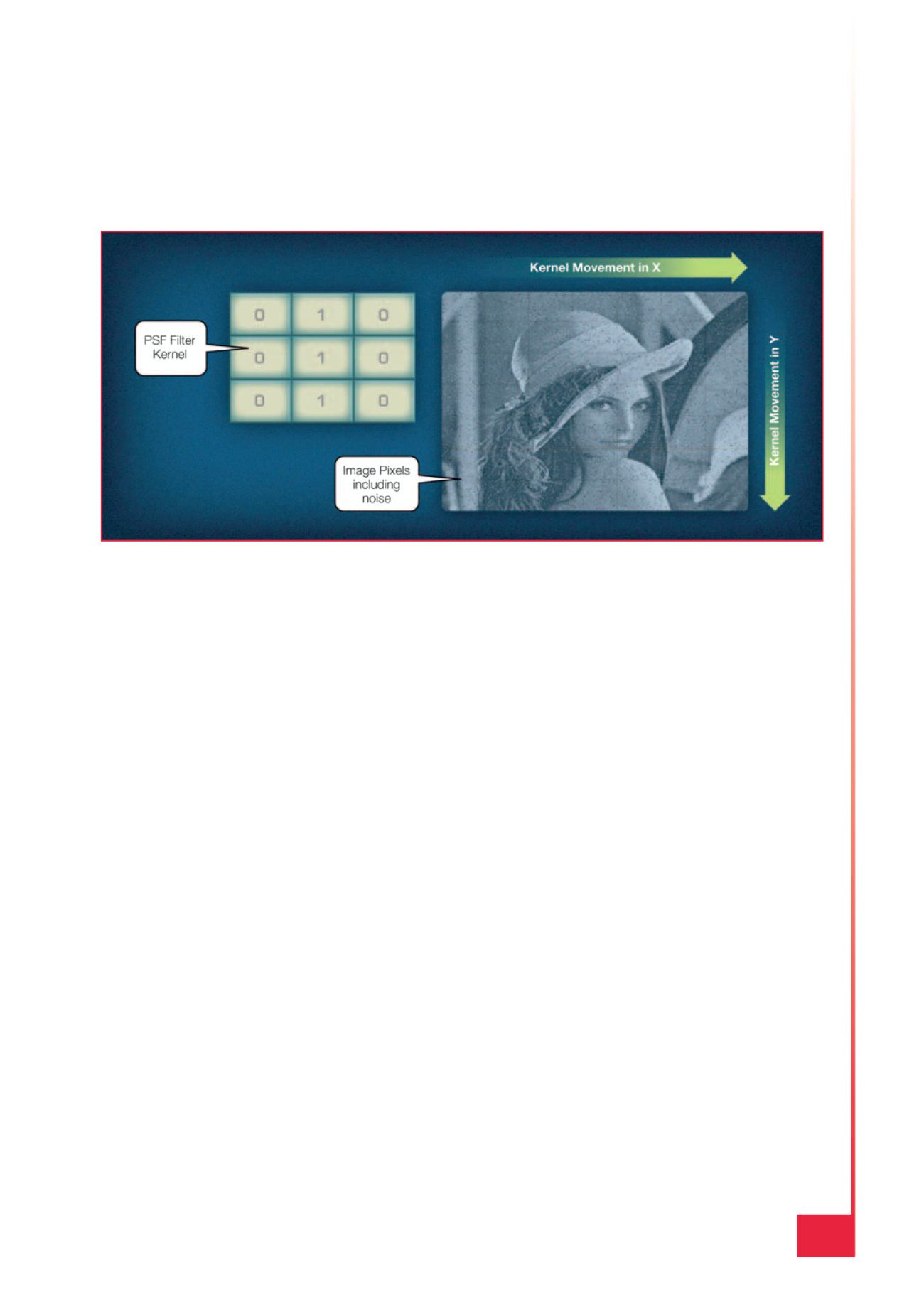
Fig. 2 – Schema di principio di un filtro per la scansione delle immagini