
















 54 / 84
54 / 84

EMBEDDED
63 • FEBBRAIO • 2017
54
HARDWARE
|
AUTOMOTIVE
re in modo autonomo, ma anche di raggiungere le de-
stinazioni previste senza interazione alcuna da parte
del conducente, è divenuto più chiaro grazie al lavoro
condotto a livello sia nazionale sia internazionale da
ricercatori e legislatori.
Assicurare il più elevato livello di sicurezza per
l’utilizzatore è una priorità assoluta ed è
appunto in questa direzione che la tecno-
logia sta evolvendo. I sistemi avanzati di
ausilio al guidatore (ADAS – Advanced
Driver Assist System) rappresentano solo
l’inizio: la vera rivoluzione si concretizzerà
solamente nel momento in cui sarà possibi-
le conferire doti di “intelligenza” e intero-
perabilità a tali sistemi.
Le piattaforme richieste per garantire un
tale livello di autonomia sono già disponi-
bili. I continui progressi nel campo delle
architetture di elaborazione, uniti alle nu-
merose iniziative nel settore del software
open source, stanno contribuendo a tramu-
tare questa visione in una realtà concreta.
Un impatto su larga scala
Non vi è dubbio che i veicoli autonomi sono
destinati a diventare una realtà all’ordine
del giorno sulle strade di tutto il mondo.
Questo fenomeno non riguarderà solamen-
te le auto familiari in grado di parcheggia-
S
u un fatto analisti ed Enti governativi con-
cordano: i veicoli autonomi sono destinati a diventa-
re una consuetudine sulle nostre strade in un futuro
abbastanza prossimo. Il percorso evolutivo da seguire
per arrivare a questo nuovo modello di riferimento,
dove i veicoli non solo saranno in grado di parcheggia-
La guida autonoma richiede
sistemi di visione “intelligenti”
I sistemi di visione intelligenti implementati sfruttando
una combinazione di piattaforme di elaborazione
avanzate come i SoC della serie G di AMD supportati
da un completo ecosistema software saranno
un elemento di fondamentale importanza nello sviluppo
di veicoli completamente autonomi
Lars Asplund
Fredrik Bruhn
Unibap AB
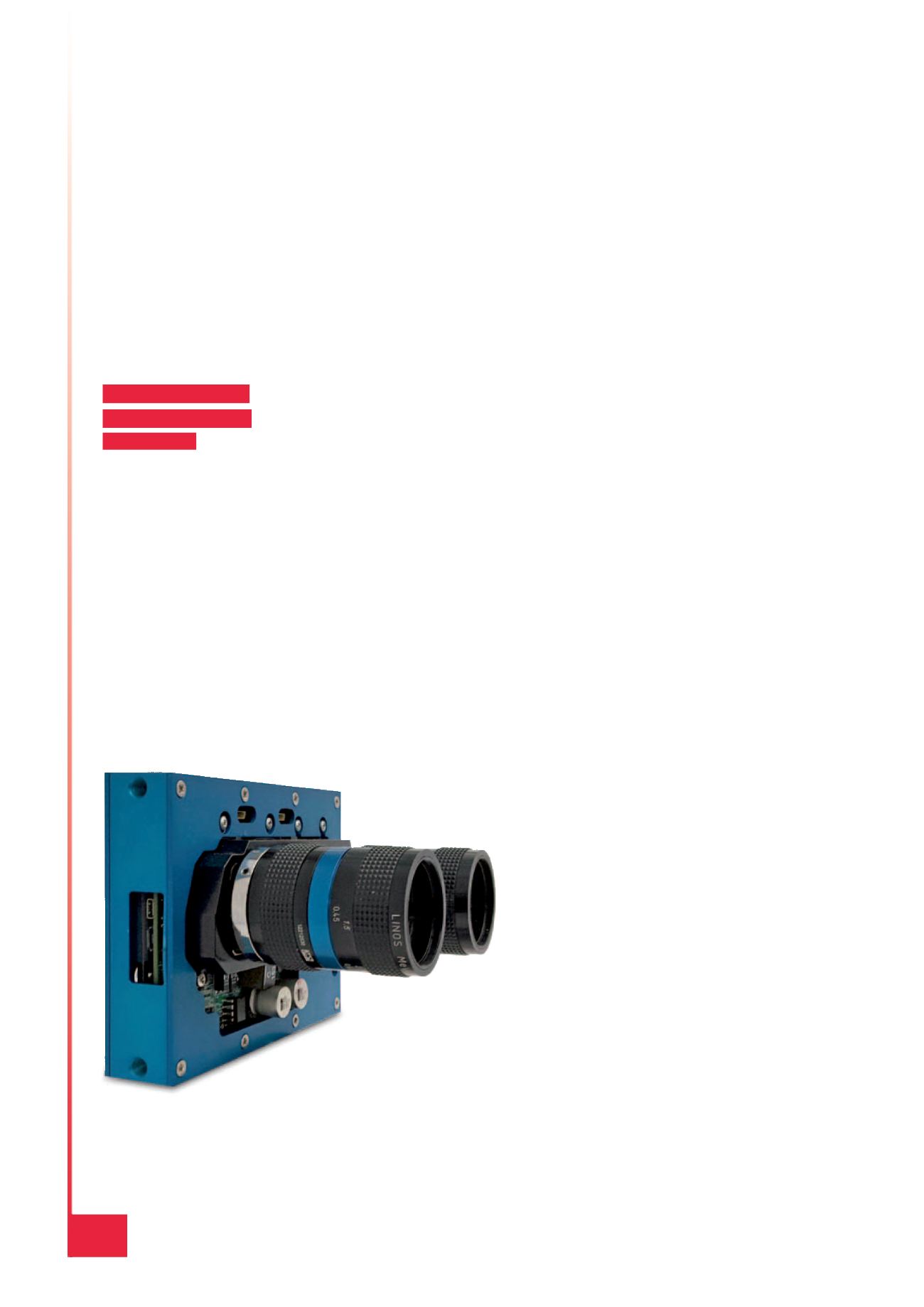
Fig. 1 – I sistemi di visione intelligenti come quello svilup-
pato da Unibap sono in grado di acquisire e identificare
i più piccoli cambiamenti che si verificano nel campo vi-
sivo per ogni singolo frame. Si tratta di una funzionalità
cruciale per raggiungere il Livello 4 della scala definita da
NHTSA relativa ai veicoli autonomi