EMBEDDED
51 • FEBBRAIO • 2014
56
HARDWARE
DIGITAL POWER
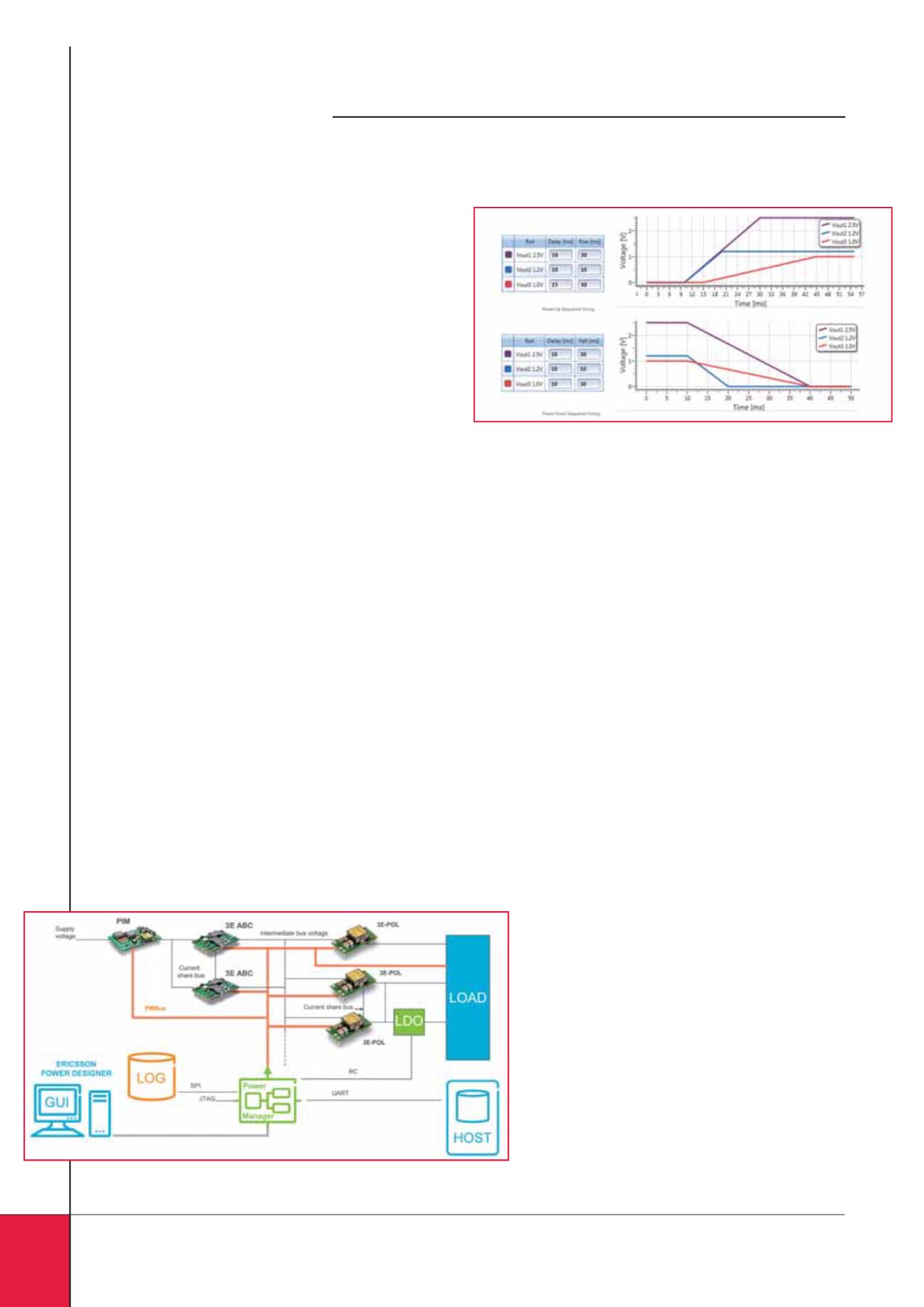
to, in un intervallo di 10 ms; il tempo di discesa, in ogni caso, è
regolato in modo da assicurare una transizione uniforme fino al
momento in cui tutte le funzioni sono disattivate.
Come menzionato in precedenza, durante la fase di progettazio-
ne dell’apparecchiatura i parametri evolvono in modo continuo
e, nel caso in cui varino i requisiti di messa in sequenza, i pro-
gettisti del sistema di alimentazione possono semplicemente
modificare il valore e inviare nel giro di pochi minuti un set di
comandi da caricare nel regolatore POL oppure un nuovo file di
configurazione per il BPM (Board Power Manager). Le mede-
sime operazioni possono essere effettuate quando il sistema è
in funzione ed è necessario un aggiornamento del firmware che
prevede una differente messa in sequenza delle tensioni al fine
di ottimizzare le prestazioni.
Come si può dedurre osservando lo schema di figura 5, i sistemi
che utilizzano un’architettura di alimentazione digitale risultano
estremamente flessibili e il responsabile del sito può accedere a
qualsiasi sezione della scheda, fino ad arrivare al singolo regola-
tore POL, attraverso l’interfaccia digitale.
Alimentare il core risparmiando energia
Nel corso degli anni l’industria dei semiconduttori ha compiuto
notevoli progressi nel campo dell’ottimizzazione dell’utilizzo
dell’energia grazie all’integrazione di funzioni di gestione
dell’energia all’interno del processore che hanno contribuito
a migliorare significativamente le prestazioni e a ridurre i
consumi. Gli odierni smartphone, tablet e laptop sono tutti
dispositivi che hanno tratto notevoli benefici da questa evo-
luzione. I processori di fascia alta usati nelle apparecchiature
per reti di trasmissione dati sono caratterizzati da una potenza
di elaborazione sempre più spinta, raggiungendo throughput
anche superiori a 300 Mbps, mentre il numero dei core presenti
nei singoli processori sta superando i limiti dettati dalla legge
di Moore. Un maggior numero di core e l’incremento della
potenza richiedono l’adozione di tecnologie di processo caratte-
rizzate da geometrie sempre più ridotte che richiedono tensioni
inferiori e correnti più elevate.
La tensione dei core è attualmente dell’ordine del Volt (e anche
inferiore) mentre la corrente, che può arrivare a 90A per un
processore operante al massimo delle sue prestazioni, si riduce
drasticamente (10A o anche meno) in caso di scarso utilizzo.
Per alimentare in maniera efficiente il processore, i progettisti
possono sfruttare un altro vantaggio tipico del controllo digitale
dell’alimentazione, ovvero quello di poter collegare un certo
numero di regolatori POL in parallelo. Per esempio è possibile
utilizzare 3 regolatori POL in parallelo per garantire una cor-
rente di 100A in tutte le condizioni e sfruttare i vantaggi legati
all’uso delle tecniche di “phase spreading” (dispersione di fase)
per diminuire i fenomeni di ondulazione e rumore alla massima
potenza e di “phase shading” (schermatura di fase) per ridurre,
in base alle condizioni operative, il numero di regolatori POL in
funzione. Sebbene complessa da gestire, l’implementazione di
questo tipo di funzionalità con i regolatori POL di tipo digitale
risulta alquanto semplice.
Nella figura 6 viene riportato un esempio di regolazione delle
fasi effettuato mediante Ericsson Power Designer. Come acca-
de per la messa in sequenza, anche le operazioni di “
phase spreading” e di “phase shading” possono essere
programmate in maniera molto semplice. Coloro che si
occupano dell’architettura del sistema possono svilup-
pare più file di configurazione per soddisfare le esigen-
ze di determinati profili che possono essere richiamati
dal BPM (Board Power Management) dalla memoria
locale. In alcune applicazioni il processore comunica
direttamente con il BPM per impostare il numero di
fasi richieste, per ottenere prestazioni ottimizzate e le
modalità da seguire per sincronizzare o variare queste
fasi.
Questo semplice esempio dà un’idea delle potenzialità
offerte dai regolatori POL di tipo digitale in grado di
comunicare direttamente con il processore principale
(master).
Fig. 4 – Esempio di messa in sequenza time-based
– tempi di salita e di discesa
Fig. 5 – Schema di un sistema che utilizza un’architettura
di alimentazione digitale


