
















 31 / 90
31 / 90

POWER
SINE-WAVING
31
- ELETTRONICA OGGI 456 - SETTEMBRE 2016
U
n dispositivo di potenza intelligente ad alta tensione
(HV-IPD) integra al suo interno i commutatori di poten-
za e i circuiti di pilotaggio e di protezione per il con-
trollo di motori elettrici in corrente continua (DC). Si tratta di un
singolo componente elettronico che semplifica il progetto, au-
menta l’affidabilità e aiuta a ridurre le dimensioni del prodotto
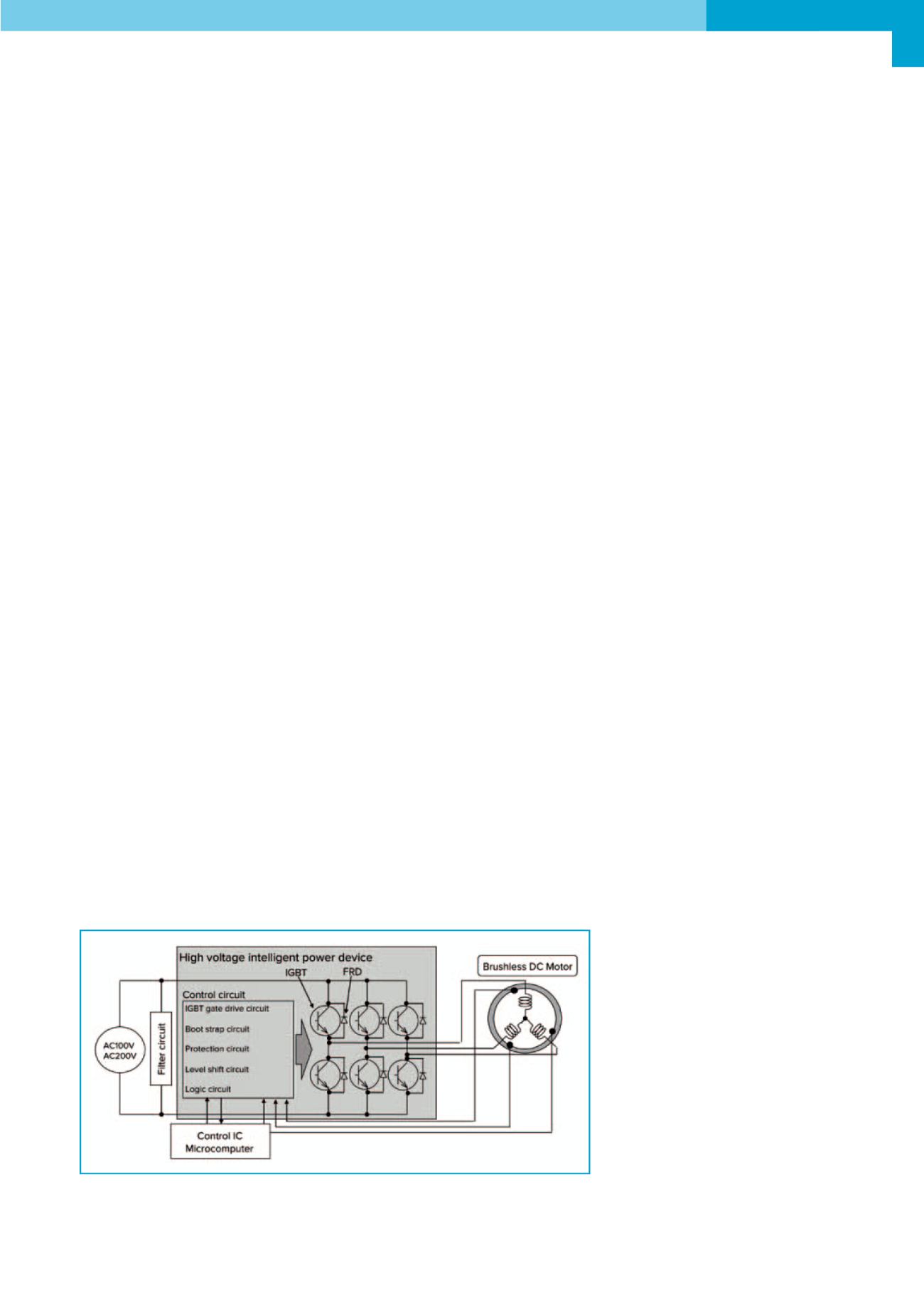
finale. La figura 1 illustra le funzioni di base di un dispositivo
HV-IPD e mostra come si possa facilmente collegare al motore
ricorrendo a un ridotto numero di componenti esterni.
Il dispositivo può essere un modulo multichip che combi-
na componenti logici e componenti ad alta tensione sepa-
rati. In alternativa, la tecnologia Silicon On Insulator (SOI)
consente una realizzazione monolitica di tutta la circuite-
ria. In questo, caso uno strato isolante di biossido di silicio,
combinato con trincee di isolamento (trench), consente la
coesistenza di dispositivi CMOS/DMOS e IGBT sullo stesso
substrato, senza dar luogo a interferenze o effetti parassiti.
L’avvento di dispositivi intelligenti monolitici e multichip ha
contribuito a ridefinire i costi associati al controllo motori,
consentendo ai progettisti di adottare motori brushless DC
(BLDC) progressivamente migliori in applicazioni critiche
dal punto di vista economico. come gli elettrodomestici e
i condizionatori. Rispetto a un motore in corrente continua
tradizionale dotato di spazzole che, sebbene possa essere
controllato in modo molto semplice variando la tensione,
presenta svantaggi in termini di usura, scarsa efficienza
e rumore meccanico, i motori BLDC offrono una maggiore
efficienza, silenziosità e fluidità operativa, minore manuten-
zione e maggiore affidabilità.
Motore trapezoidale o sinusoidale
Come mostrato in figura 1, lo stadio finale è responsabi-
le dell’erogazione della corrente negli avvolgimenti dello
statore, che genera la coppia contrastando la forza contro-
elettromotrice (back-EFM) che viene indotta negli avvol-
gimenti in funzione della posizione del rotore. Durante la
rotazione, la forma d’onda della forza
contro-elettromotrice può essere sia
sinusoidale che trapezoidale, in fun-
zione di fattori quali la forma e la ma-
gnetizzazione dei magneti del rotore,
il traferro tra rotore e statore, la forma
dello statore e il modo in cui gli avvol-
gimenti sono applicati su di esso. La
figura 2 riporta un esempio reale di
queste forme d’onda.
Il controllo con forma d’onda trape-
zoidale (a onda quadra) si basa sul
controllo ogni 120° eseguito tramite
la misura dei segnali di posizione del
rotore (rilevata tramite sensori ad ef-
Ridurre le perdite con moduli
di pilotaggio a onde sinusoidali
Georges Tchouangue
Toshiba Electronics Europe
I consumatori si sono abituati alle eccellenti
prestazioni e all’efficienza energetica degli
elettrodomestici realizzati con azionamenti
a velocità variabile. Per conseguire risultati
ancora migliori è necessario ricorrere a motori
di qualità superiore con un adeguato controllo
della corrente sinusoidale
Fig. 1 – I blocchi funzionali di un dispositivo di potenza intelligente HV-IPD collegato a un
motore DC brushless