


















 86 / 102
86 / 102

POWER 8 - giugno 2015
XII
Power
La crescente complessità di grandi sistemi di elaborazio-
ne ha costretto i produttori di alimentatori a migliorare
l’efficienza, la precisione e la risposta ai transitori. Più re-
centemente, tuttavia, sta diventando necessario anche il
controllo digitale per il monitoraggio, le impostazioni e
la creazione di rapporti. Un’elevata efficienza è essenziale
in sistemi distribuiti, dove si utilizzano notevoli rapporti
di discesa (step-down) da bus a tensione intermedia per
creare linee di alimentazione locale a bassa tensione, che
generano alte correnti per ridurre al minimo i proble-
mi termici causati da efficienze di conversione scadenti.
I sistemi host possono avere dozzine di linee di tensione
locali che generano un’ampia gamma di livelli di potenza.
Ad esempio, nei sistemi di trasmissione dati possono es-
servi fino a 50 linee di tensione al punto di carico, alcune
delle quali generano correnti uguali o anche maggiori di
centinaia di ampere. I progettisti di sistemi vorrebbero
perciò essere in grado di monitorare e regolare agevol-
mente le tensioni di alimentazione, la sequenza, impo-
stare i limiti della tensione di funzionamento e leggere
parametri quali tensione, corrente e temperature, nonché
accedere a un registro dettagliato dei guasti.
Un metodo molto diffuso per controllare un sistema con
un gran numero di linee prevede l’impiego di un bus di
comunicazione digitale; questo metodo spesso viene indi-
cato con il termine “alimentazione digitale” o “gestione
del sistema di alimentazione” (PSM - Power System Mana-
gement), e consente ai progettisti di controllare, monito-
Bruce Haug
Senior product marketing engineer
Power products
Linear TechnologyConvertitore con controllo
e supervisione
per linee
ad alta corrente
Il metodo PSM (Power System Management) è una funzionalità molto utile durante le
fasi di sviluppo e debug, poiché consente ai progettisti di rendere operativi i loro sistemi
in tempi brevi e con la possibilità di regolare e controllare le tensioni di alimentazione, i
limiti e le sequenze, senza bisogno di apportare modifiche all’hardware fisico, al circuito
e/o alla BOM del sistema
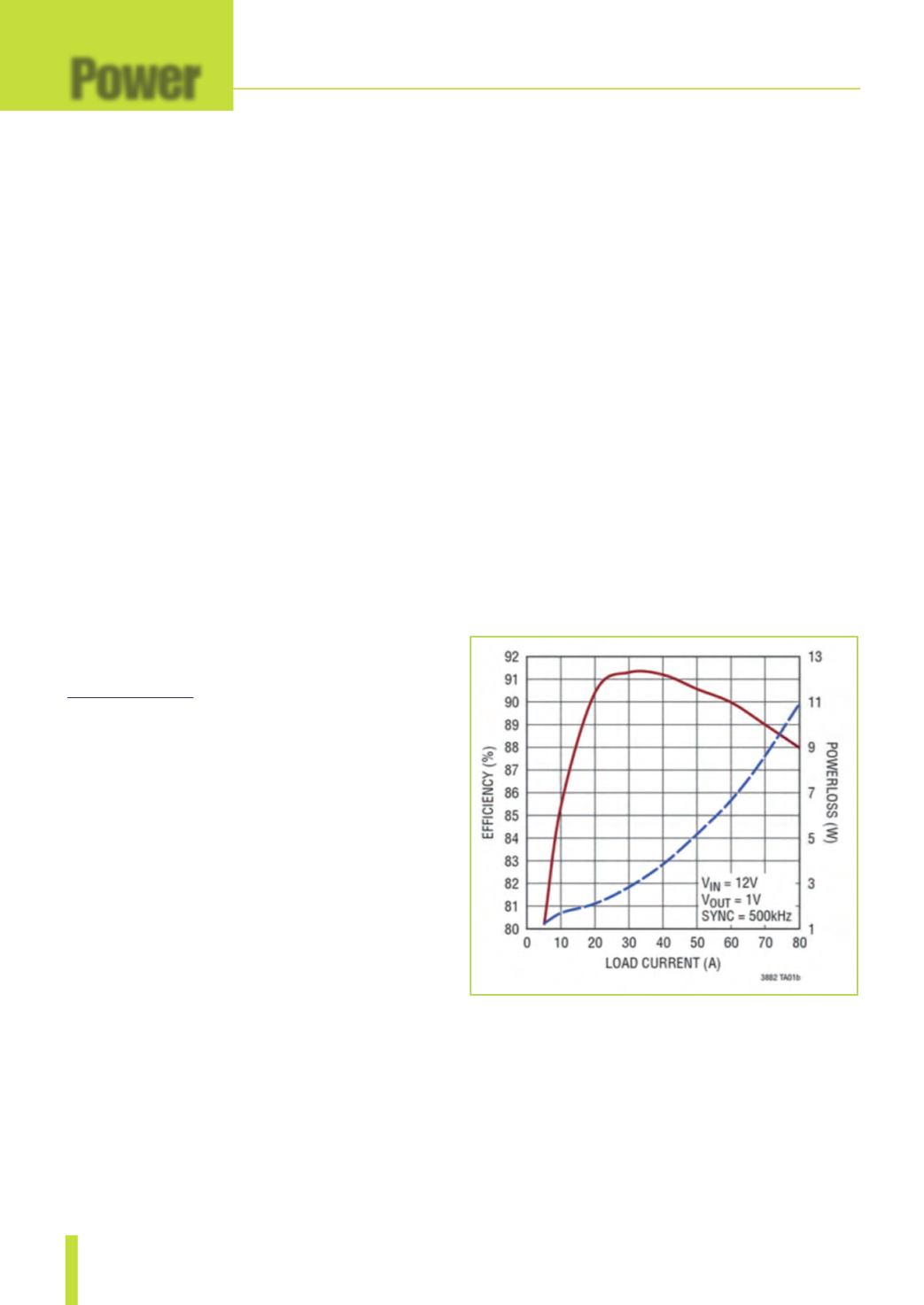
Fig. 1 – Tipico schema applicativo dell’LTC3882