29
- ELETTRONICA OGGI 436 - MAGGIO 2014
TECH INSIGHT
MICROROBOTICA
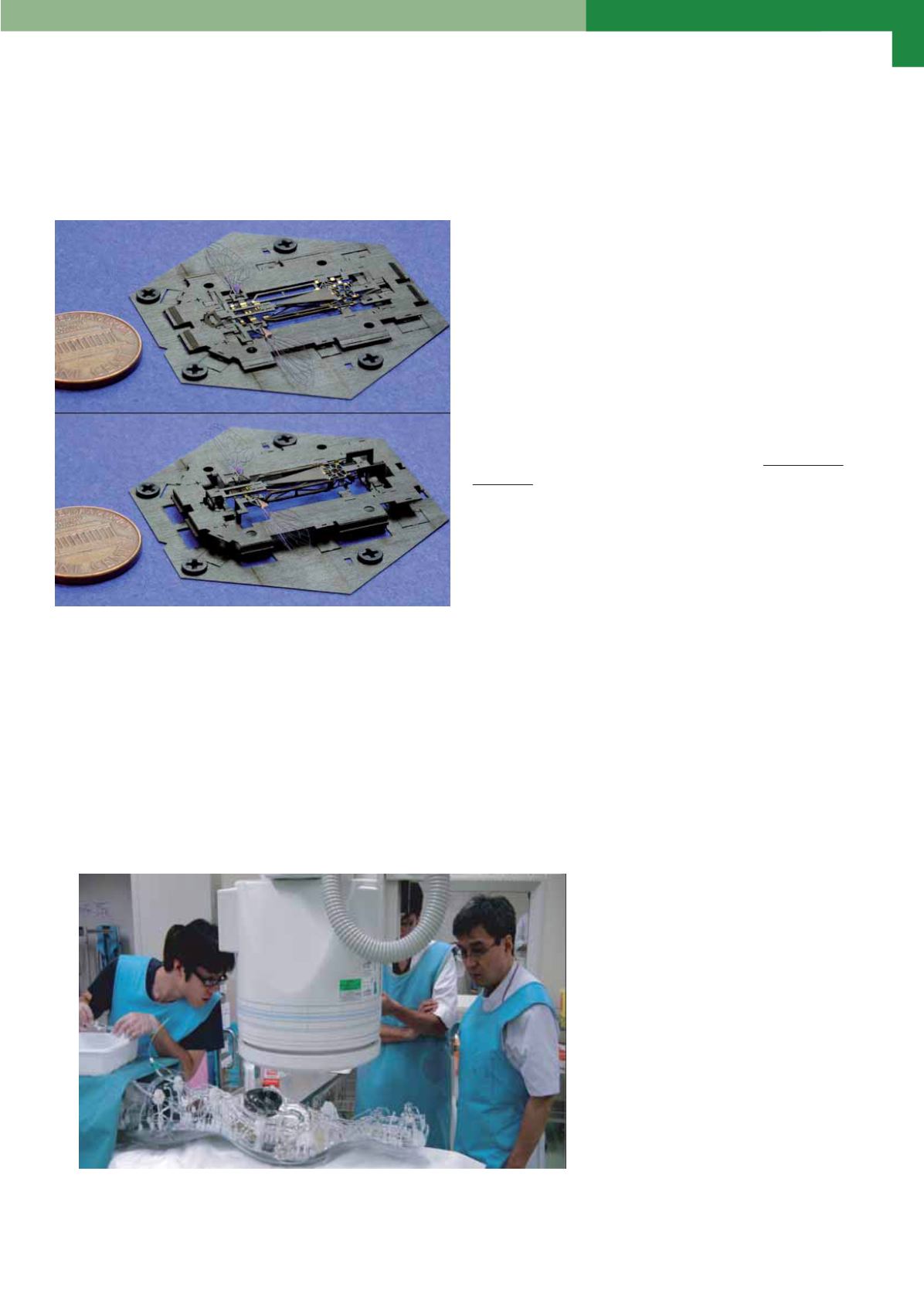
coordinato. A differenza dei simulatori basati su realtà
virtuale, EVE consente di costruire modelli fisici dello
specifico sistema vascolare di un dato paziente, usando
sistemi di stampa 3D. Un’unità dedicata simula poi la cir-
colazione del sangue, in modo da rendere lo scenario il
più realistico possibile.
Microrobot possono essere usati anche per ridurre l’inva-
sività di metodologie diagnostiche come l’esame del tratto
gastrointestinale, eseguibile tramite endoscopia. In questo
campo, l’uso di capsule endoscopiche miniaturizzate e
munite di sensori di immagine costituisce un’alternativa
più praticabile e molto meno invasiva rispetto alle tecniche
tradizionali. Negli ultimi anni, questi robot hanno espanso le
proprie funzionalità, aggiungendo alla dotazione dispositivi
lab-on-chip equipaggiati con sensori di pH, pressione e
temperatura, e strutture adatte alla locomozione. Si pos-
sono poi citare altri progetti interessanti, come quello per
la piattaforma ARAKNES (Array of Robots Augmenting the
KiNematics of Endoluminal Surgery), coordinato dal profes-
sor Paolo Dario, della Scuola Superiore Sant’Anna di Pisa
(SSSA) o, ancora, il programma Cyberplasm (
plasm.net). Quest’ultimo si propone di costruire robot di
scala micrometrica utilizzando i principi della biologia sin-
tetica. In sostanza, l’idea è applicare i metodi ingegneristici
alla costruzione di dispositivi basati su ‘building blocks’
biologici (cellule, batteri opportunamente modificati), per
arrivare a robot bioibridi multicellulari.
Compiti vitali
Ci sono alcuni compiti chiave che i microrobot possono
svolgere. Ad esempio, nell’esecuzione delle terapie, pos-
sono essere introdotti nel corpo umano, navigando al suo
interno per rilasciare farmaci (sostanze chimiche, biolo-
giche, fonti radioattive e così via) in maniera mirata, ed
evitare danni a cellule o organi sani che non necessitano
della cura. Si possono usare per rimuovere meccanicamen-
te, o tramite ablazione a ultrasuoni, materiale indesiderato,
come le placche di colesterolo che con gli anni incrostano
e ostruiscono le arterie; oppure per effettuare biopsie e
prelievi di tessuti, da usare per successivi esami. Se il
microrobot è dotato di sensori controllabili in remoto, l’ana-
lisi del campione di tessuto può avvenire
direttamente in loco. Ancora, i microrobot
possono funzionare come strutture stati-
che e controllabili all’interno del corpo, per
varie ragioni: ad esempio, si possono posi-
zionare in punti desiderati per costituire
impalcature di supporto alla rigenerazione
dei nervi, o per dispiegare elementi che le
vanno a formare. Possono funzionare come
protesi ‘stent’ nei vasi arteriosi, durante gli
interventi di angioplastica; creare occlu-
sioni controllate nei vasi, o essere impie-
gati per introdurre impianti o elettrodi, ad
esempio per la stimolazione del cervello.
Un altro campo di applicazione è la teleme-
tria: i microrobot possono tramettere dati
all’ambiente esterno da posizioni difficili o
impossibili da raggiungere in altri modi.
Q
Fig. 5 – EVE, il simulatore robotico per chirurgia endovascolare (Fonte FAIN Biomedical)
Fig. 4 – La tecnica di microfabbricazione ‘pop-up’ MoBee (Monolithic
Bee) – Fonte Harvard


