26
- ELETTRONICA OGGI 436 - MAGGIO 2014
TECH INSIGHT
MICROROBOTICA
i dispositivi con dimensioni dell’ordine di pochi micrometri
cubi e costruiti tramite il ricorso a tecniche di microfabbri-
cazione; dotati di micromotori, sensori e circuiti di elabo-
razione dati. E si può parlare anche di nanorobot, quando
si intende dispositivi con dimensioni simili a quelle di una
cellula biologica. In ogni caso, tutti questo robot rappresen-
tano una frontiera nelle attività di sviluppo tecnologico, per
le sfide ingegneristiche che implicano in termini di lavoro
di ricerca, e adozione di nuovi materiali, batterie e disposi-
tivi d’alimentazione, tipologie di semiconduttori, sensori e
sistemi di attuazione.
In effetti, quando l’obiettivo di ricercatori e ingegneri
diventa creare meccanismi robotici miniaturizzati su scala
estremamente ridotta, diventa spesso necessario un radi-
cale ripensamento dei convenzionali paradigmi ingegneri-
stici, utilizzati di routine nei consolidati processi costruttivi,
come quelli che permettono di costruire un’automobile o un
aereo. A tal proposito, l’ideazione e realizzazione del pro-
getto ‘RoboBee’, un robot miniaturizzato e minuscolo come
un insetto, sviluppato nei laboratori di microrobotica dell’u-
niversità di Harward, ha davvero significato un profondo
percorso di trasformazione mentale nel modo di concepire
nuove soluzioni ingegneristiche su scala miniaturizzata. E
indica anche in maniera chiara come la ricerca microroboti-
ca stia evolvendosi, e quali siano gli obiettivi futuri a cui sta
puntando l’avanzamento tecnologico nella microelettronica
e nanoelettronica.
Nuovi concetti ingegneristici
La dimostrazione della RoboBee, l’ape-robot che ha spicca-
to il volo per la prima volta l’anno scorso in un laboratorio
di Harvard, rappresenta il culmine di oltre un decennio di
lavoro, condotto dai ricercatori della Harvard School of
Engineering and Applied Sciences (SEAS) e dallo Wyss
Institute for Biologically Inspired Engineering, sempre ad
Harward. Questo robot insetto ‘biologicamente ispirato’
pesa soltanto 80 milligrammi e ha un’apertura alare di tre
centimetri. Le sua ali possono muoversi fino alla velocità
di 120 volte al secondo, ritmo a cui diventano in sostanza
invisibili.
La realizzazione del microrobot è stata possibile grazie all’u-
tilizzo di materiali molto innovativi, di processi di microfab-
bricazione che si pongono all’avanguardia tecnologica, e
di sistemi di controllo altrettanto evoluti. Come ha spiegato
Robert J. Wood – Charles River professor of engineering
and applied sciences al SEAS, Wyss Core faculty mem-
ber, e principal investigator del progetto RoboBee – per
questo specifico progetto è stato necessario sviluppare da
zero soluzioni per ogni cosa. Ad esempio, per i ‘muscoli’
che muovono le ali. I tradizionali robot che si è abituati a
vedere e concepire sono normalmente azionati da motori
elettromagnetici. Ma questi ultimi non sono applicabili ai
livelli di miniaturizzazione a cui arriva l’ape robot. Dunque
occorreva un’alternativa. E difatti un’alternativa è stata
trovata. Il microrobot insetto è in grado di battere le ali
grazie ad attuatori piezoelettrici, elementi ceramici capaci
di espandersi e contrarsi quando viene loro applicato un
campo elettrico. Le ali sono articolate su giunti, costituiti
da sottili cerniere di plastica integrate nel telaio in fibra di
carbonio del corpo. Esiste poi un sistema di controllo estre-
mamente raffinato, in grado di comandare i movimenti rota-
zionali, e controllare ciascuna ala in modo indipendente e in
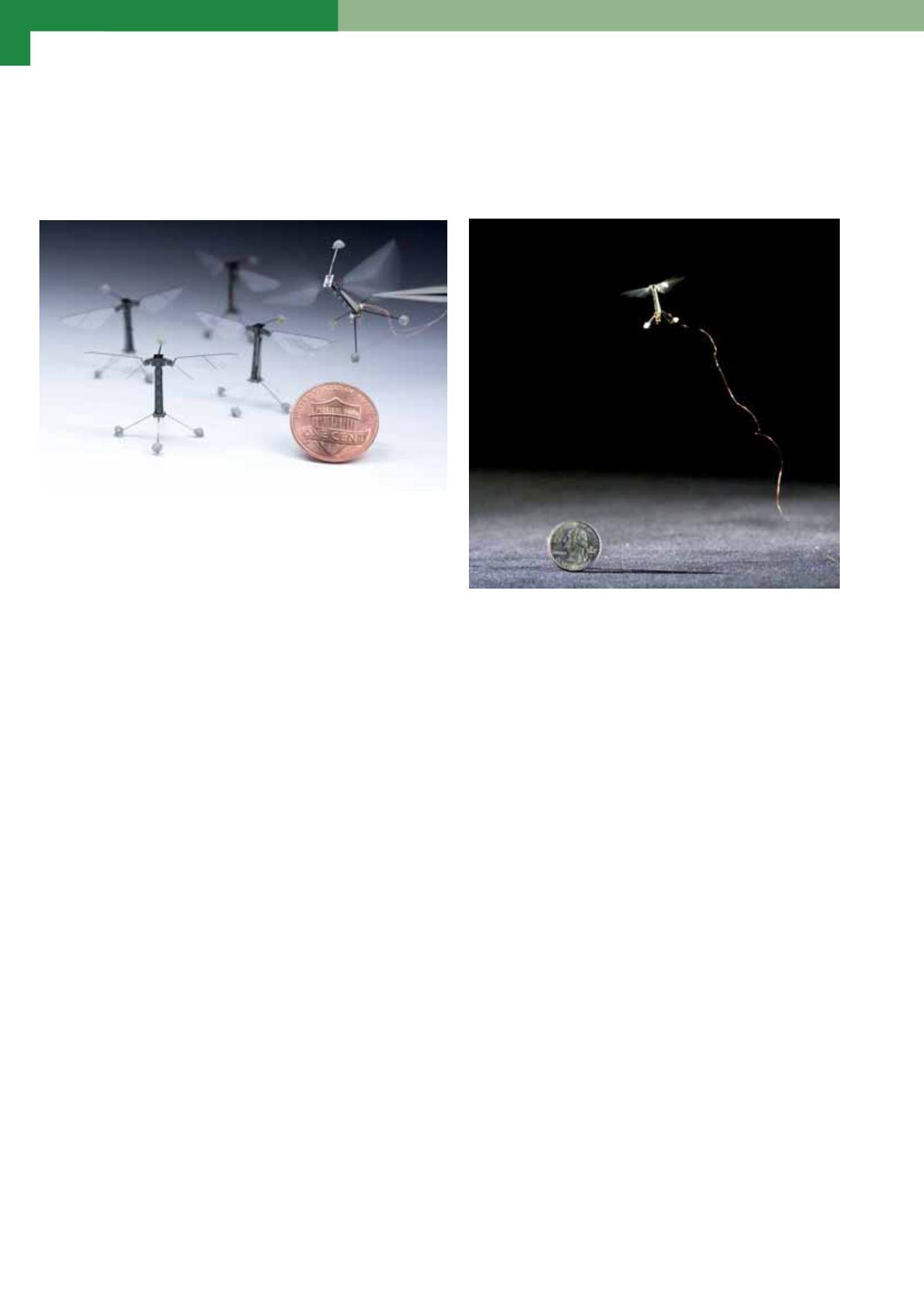
Figg. 1-2 – Due immagini dell’ape-robot RoboBee (Fonte Harvard)


