“Entrare in Sintonia” con il Filtro EMI
-

- Tweet
- Pin It
- Condividi per email
-
MarcSmith, Principal Engineer, Central Applications, Analog Devices
Questo articolo tratta l’analisi e le linee guida per la progettazione del convenzionale filtro EMI passivo di modo comune/differenziale, generalmente implementato nei circuiti AFE per ECG e bioimpedenza (BioZ). Si illustra come un filtro EMI sbilanciato faciliti la diffusione del rumore di modo comune sulla linea di segnale differenziale, riducendo così le prestazioni SNR. Questo fenomeno viene definito conversione da modo comune a modo differenziale (conversione CM-DM). Grazie a una scelta oculata dei componenti, il progettista può attenuare il relativo degrado dell’SNR, fornendo al contempo un filtraggio adeguato del segnale per gli AFE ECG e BioZ.
Si apprenderà…
-
Come analizzare la funzione di trasferimento di un filtro CM-DM.
-
Come identificare le fonti di rumore che potrebbero compromettere le prestazioni dei circuiti di filtraggio sbilanciati.
-
La tecnica di conversione da modo comune a modo differenziale.
-
Come impostare la larghezza di banda del filtro di modo comune e la larghezza di banda del filtro di modo differenziale.
-
L’impostazione del filtro consigliata per l’uso con i dispositivi MAX3000x ECG e BioZ AFE.
Introduzione
Questo articolo presenta un’analisi e una discussione dei limiti di prestazione dovuti agli sbilanciamenti del tradizionale filtro passivo da modo comune (CM) a modo differenziale (DM).
La Figura 1 mostra lo schema di una tipica implementazione circuitale del front-end analogico (AFE) per elettrocardiogrammi (ECG) MAX30001. I due filtri esterni per le interferenze elettromagnetiche (EMI) (uno evidenziato in blu) mostrati nella Figura 1 sono circuiti di filtraggio convenzionali CM-DM.
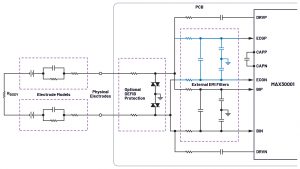
Figura 1. Monitoraggio ECG e respiratorio a due elettrodi.
I filtri EMI esterni in questione (implementati con circuiti di filtraggio CM-to-DM tradizionali) presentano una limitazione della larghezza di banda sia di modo comune che differenziale. Inoltre, scegliendo con criterio il valore di un solo componente (il condensatore di modo differenziale), il progettista può attenuare il degrado del rapporto segnale/rumore (SNR) dovuto allo sbilanciamento della linea di segnale di modo comune. Niente male, per soli cinque componenti passivi!
Prima di addentrarci in questo circuito, esaminiamo brevemente quali fonti esterne di EMI possono essere previste. L’EMI è un disturbo del circuito associato a fonti esterne di induzione elettromagnetica (accoppiamento magnetico), elettrostatica (accoppiamento capacitivo) o alla conduzione diretta. Fondamentalmente, le EMI possono entrare nei circuiti tramite radiazione e/o conduzione. La Figura 2 mostra gli spettri di frequenza con esempi di diverse sorgenti comuni di EMI.
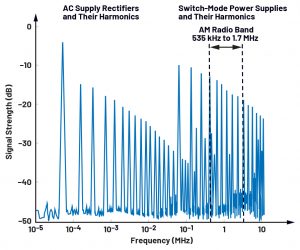
Figura 2. L’ampio spettro di rumore EMI.
Il Filtro Passivo CM-DM Tradizionale
La Figura 3 mostra il filtro passivo convenzionale da CM a DM generalmente utilizzato per mitigare il rumore ambientale. Per le applicazioni ECG, in cui le larghezze di banda sono tipicamente limitate a 256 Hz (512 SPS) o meno, i segnali della linea di alimentazione AC (come 50 Hz/60 Hz) rappresentano di solito le sorgenti EMI più invadenti. Questi segnali possono presentarsi come segnali di modo comune che non vogliamo interferiscano con il segnale differenziale di interesse. Se il filtro passivo CM-DM è sbilanciato, i segnali indesiderati (noti anche come rumore) possono alterare i segnali differenziali che ci interessano.
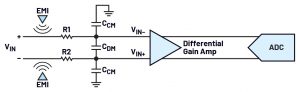
Figura 3. Circuito del filtro CM-DM tradizionale.
Il Filtro di Modo Comune e la Conversione CM-DM
Il filtro passivo (EMI) CM-DM può essere visto come un filtro composito, costituito da un filtro RC di modo comune e da un filtro RC di modo differenziale. La Figura 4 mostra queste due configurazioni di filtro come circuiti indipendenti. Si noti che queste strutture di filtro, compreso il filtro passivo CM-DM, sono spesso utilizzate come filtri antialiasing (AAF) nei circuiti di conversione analogico-digitale a campionamento, come i modulatori delta-sigma. Pertanto, la presente analisi si applica anche agli AAF e ad altri circuiti a segnale differenziale.
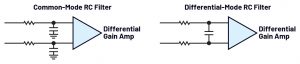
Figura 4. Il filtro RC di modo comune e il filtro RC di modo differenziale.
Il filtro CM è di particolare interesse perché può essere un canale di rumore quando il suo circuito è sbilanciato (cioè, quando i due percorsi di segnale di ingresso hanno costanti di tempo diverse). Questa è una condizione tipica, date le tolleranze dei componenti, i coefficienti di temperatura, i coefficienti di tensione, ecc. In un ambiente elettrico rumoroso, la reiezione di modo comune del filtro CM determina la quantità di rumore che può essere potenzialmente iniettata nel canale di modo differenziale. Questo rumore iniettato ridurrà l’SNR del segnale di interesse (il segnale del canale differenziale). Questa operazione viene definita conversione da CM a DM. Prevedendo le caratteristiche dell’ambiente elettrico, il progettista può adattare i componenti in modo appropriato per ridurre la conversione CM-DM.
Approssimazioni utili della Larghezza di Banda
Prima di analizzare la funzione di trasferimento della conversione CM-DM, calcoliamo le larghezze di banda dei circuiti di modo comune e differenziale del filtro CM-DM bilanciato. Questi calcoli non solo forniscono al progettista diverse equazioni utili per la messa a punto dei circuiti nelle applicazioni ECG/BioZ, ma aiutano anche a interpretare l’espressione della conversione CM-DM.
La Figura 5 mostra i circuiti equivalenti per le configurazioni bilanciate di modo comune e bilanciate di modo differenziale. Nella Figura 5a, il circuito di modo comune bilanciato produce livelli di segnale identici in uscita (VOUT = 0 V). Pertanto, il condensatore di modo differenziale CDM non influisce sulla larghezza di banda del circuito e come tale viene rimosso dal modello del circuito equivalente. La larghezza di banda di modo comune è determinata dalla costante di tempo R × CCM.
Nella Figura 5b, si applica la tecnica del circuito speculare, sostituendo il condensatore differenziale con due condensatori in serie di valore 2 × CDM (impedenza equivalente CDM). Per un circuito bilanciato, tra i condensatori 2 × CDM esiste un punto di massa virtuale che genera due gambe identiche, una delle quali imposta la larghezza di banda. La larghezza di banda del modo differenziale è determinata dalla costante di tempo R(CCM + 2 × CDM).
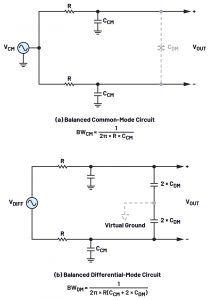
Figura 5. (a) Un circuito di modo comune bilanciato e (b) uno di modo differenziale bilanciato.
Sebbene queste espressioni sulla larghezza di banda siano utili, si tratta di valori ideali. Qualsiasi sbilanciamento del circuito influisce sulle larghezze di banda di modo comune e di modo differenziale. Sebbene uno sbilanciamento possa portare a una perdita di potenza del segnale differenziale (conversione DM-CM), è possibile rimediare aumentando il guadagno negli stadi successivi. D’altra parte, uno sbilanciamento con un ambiente esterno rumoroso può portare a una diminuzione dell’SNR del canale differenziale attraverso la conversione CM-DM.
La Funzione di Trasferimento della Conversione CM-DM
La Figura 6 mostra una topologia equivalente per l’analisi del circuito CM-DM: un circuito a ponte.
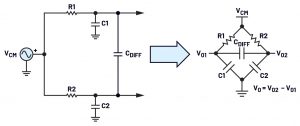
Figura 6. Topologia del circuito per l’analisi del circuito CM-DM.
I circuiti a ponte (ad esempio, il ponte di Wheatstone) sono stati ampiamente utilizzati fin dalla metà del XIX secolo. Pur essendo implementati in una moltitudine di applicazioni, qui vengono utilizzati come ausilio per l’analisi. La Figura 7 evidenzia le equazioni della funzione di trasferimento per un generico circuito a ponte (esteso dalla derivazione del ponte di Wheatstone).
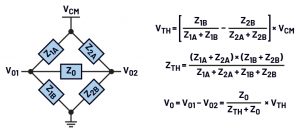
Figura 7. Circuito a ponte (ponte di Wheatstone).
Applicando queste equazioni al circuito della Figura 6 si ottiene la seguente funzione di trasferimento della conversione CM-DM:
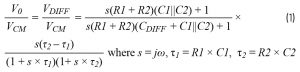
Si noti che in questa funzione di trasferimento ci sono tre poli e due zeri. Dal punto di vista dell’ingegneria dei sistemi, si tratta di una funzione di trasferimento del sistema di tipo 1, a 3 ordini. L’Equazione 2 esprime in forma generica e mette in evidenza l’effetto di uno sbilanciamento del circuito (cioè, quando τ2 ≠ τ1).
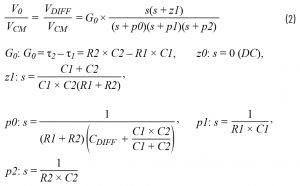
Sorprendentemente, questa funzione di trasferimento a 5 termini è piuttosto complessa per soli cinque componenti passivi. L’esame dei singoli termini può aiutare a semplificare le cose. I poli p1 e p2 definiscono due angoli di frequenza più alti, mentre il polo p0 definisce un angolo di frequenza più basso. Per impostazione predefinita (a causa della capacità aggiuntiva), BWp0 < BWp1 ≈ BWp2. Se si implementa un CDIFF grande (CDIFF >> C1||C2), il trasferimento del rumore di modo comune a bassa frequenza (cioè < BWp0) sarà desensibilizzato dal disadattamento di C1 e C2.
Approssimazioni Pratiche della Funzione di Trasferimento CM-DM
Facendo riferimento alle approssimazioni della larghezza di banda della Figura 5, si noti che i poli p1 e p2 corrispondono alla larghezza di banda di modo comune. Inoltre, se R1 ≈ R2 e C1 ≈ C2, il polo p0 corrisponde alla larghezza di banda di modo differenziale (la matematica è lasciata al lettore).
Andando un po’ oltre, se R1 ≈ R2 e C1 ≈ C2, lo zero Z1 approssima uno dei due poli, p1 e p2. L’annullamento di una coppia polo/zero approssimativamente uguale non solo semplifica la nostra espressione, ma produce un’utile approssimazione della funzione di trasferimento.
La coppia polo/zero annullata non influisce sul guadagno CM-DM alle basse frequenze. Aggiunge un errore di guadagno a frequenze più elevate (≥ 535 kHz per le emissioni radio AM) a seconda del disadattamento del filtro EMI.
La funzione di trasferimento approssimativa della conversione CM-DM è la seguente:
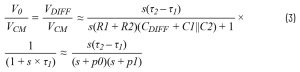
Nota: il polo p1 è stato mantenuto nell’espressione assumendo che esso stabilisca una frequenza d’angolo più alta rispetto al polo p2. Questo polo avrà un’influenza maggiore sulle attenuazioni a frequenza più elevata.
L’esame dell’Equazione 3 rivela che, quando le due costanti di tempo nel numeratore sono uguali, il circuito è perfettamente bilanciato e il guadagno di trasferimento è pari a zero (reiezione di modo comune infinita). Anche se teoricamente possibile, si tratta di un evento molto improbabile. Anche se si riuscisse a bilanciare a mano il circuito, molti altri effetti lo allontanerebbero da questo caso ideale (invecchiamento, temperatura, effetti di tensione, ecc.). Il progettista può impiegare meglio il suo tempo per capire la sensibilità della conversione CM-DM alle tolleranze dei componenti. Questo aiuterà a impostare i livelli iniziali di reiezione del rumore EMI di modo comune.
Nota: il filtro EMI CM-DM non è considerato un circuito di precisione. Viene implementato in situazioni in cui non si conosce bene l’intensità del segnale di rumore ambientale. In quanto tale, è destinato a sopprimere le sorgenti di rumore comunemente conosciute (come i disturbi della linea elettrica, i disturbi radiofonici AM e così via).
Ora che abbiamo attraversato il ponte dell’infinito, torniamo nel mondo reale e andiamo avanti sapendo che uno sbilanciamento è la norma. Infatti, il caso peggiore di sbilanciamento è quello su cui ci dobbiamo concentrare. Rivedendo l’Equazione 3, notiamo che la funzione di trasferimento sale a 20 dB/dec, si appiattisce al polo della frequenza inferiore (fL) e poi inizia a scendere a -20 dB/dec sopra il polo della frequenza superiore (fH). La frequenza centrale può essere approssimata prendendo la media geometrica delle frequenze dei due poli. Tuttavia, questo errore di approssimazione aumenta con il disadattamento dei componenti. Per errori di disallineamento elevati (come resistenze con tolleranza ±1% e condensatori con tolleranza ±20%), si consiglia di trovare (mediante analisi manuale e/o simulazione) il guadagno di picco a -180° di sfasamento.
Il picco del guadagno a media frequenza può essere approssimato come segue:

Se CDIFF >> C1 ≈ C2, il guadagno di picco a media frequenza può essere ulteriormente semplificato come segue:

Se si sceglie la stessa tolleranza, indicata con δ, per tutti i componenti, l’Equazione 5 si riduce a:

Sebbene questo sia un po’ restrittivo dal punto di vista della progettazione (selezione di componenti con pari tolleranze), sottolinea il fatto che quanto più piccolo è il rapporto tra i condensatori (rapporto tra capacità di modo comune e capacità di modo differenziale), tanto più il circuito attenua il rumore di modo comune.
Tornando all’Equazione 5, quando si analizza il circuito per le condizioni di tolleranza peggiori, si assume che i valori dei componenti possano variare in modo tale da massimizzare il numeratore. Quanto più grande è il disallineamento delle costanti di tempo RC (sbilanciamento del circuito), tanto più il rumore di modo comune si propagherà nel canale differenziale. Per quanto riguarda il termine del denominatore, l’espressione può essere semplificata, considerando che la somma delle resistenze sarà semplicemente il doppio della resistenza nominale, come segue:
![]()
Sostituendo l’Equazione 7 nell’Equazione 5 si ottiene:

L’Equazione 8 è un’approssimazione molto semplice e pratica per il guadagno a media frequenza della conversione CM-DM: il disadattamento della costante di tempo di modo comune diviso per la costante di tempo nominale di modo differenziale. Finché CDIFF è grande (CDIFF ≥ 100 × (C1 e C2)), l’Equazione 8 è abbastanza precisa.
Si potrebbe essere tentati di aumentare arbitrariamente CDIFF per diminuire la sensibilità del numeratore (cioè la mancata corrispondenza della costante di tempo RC). Sfortunatamente quest’opzione ha dei limiti, in quanto stabilisce la larghezza di banda del canale del modo differenziale (il segnale di interesse). Pertanto, sarà necessario ricorrere a un compromesso.
La reiezione di modo comune a 50 Hz/60 Hz (potenziale interferenza della linea elettrica) e a 535 kHz (l’estremità bassa della potenziale interferenza dello spettro radio AM) può ora essere approssimata utilizzando il guadagno di picco a media frequenza e gli angoli di frequenza inferiore e superiore. L’esempio seguente mette in evidenza questo aspetto.
Esempio di Funzione di Trasferimento di Conversione CM-DM
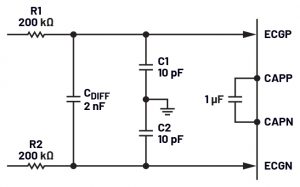
Figura 8. Esempio di filtro EMI.
Supponiamo che ogni componente abbia una tolleranza dello 0,1%. In questo modo si ottiene un livello di riferimento con cui confrontare gli scenari alternativi dei circuiti di filtraggio EMI (Figura 8). Per un’approssimazione della reiezione nel caso peggiore (worst case, wc), utilizzare i seguenti valori:

Applicando l’Equazione 8,
Tenendo presente che il denominatore dell’espressione precedente è la costante di tempo dell’angolo di frequenza inferiore, possiamo facilmente calcolare fL:
![]()
Utilizziamo ora la costante di tempo RC più piccola che definisce il polo a frequenza più alta:
![]()
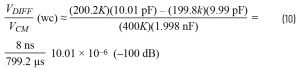
Con questi valori, possiamo ora stimare l’attenuazione a Hz/60 Hz e 535 kHz come segue:
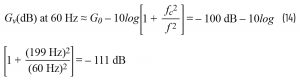

Questi calcoli manuali concordano con la simulazione del circuito (vedi Figura 9). Ricordate che questo non è un circuito di precisione. Approssimazioni di alcuni dB sono generalmente accettabili per un’applicazione di filtro EMI.
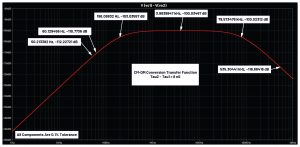
Figure 9. Simulazione del filtro EMI con componenti a tolleranza 0,1%.
La Tabella 1 evidenzia la reiezione CM-DM di questo circuito a 50 Hz/60 Hz e 535 kHz per vari livelli di tolleranza dei componenti. Il primo scenario (tolleranza ±0,1%) è un punto di riferimento piuttosto arbitrario, basato sulla misurazione manuale dei componenti passivi su un banco di laboratorio. Gli altri scenari riflettono i livelli di tolleranza di resistenze e condensatori comunemente disponibili in commercio.
Tabella 1. Stime di Attenuazione di Filtro EMI CM-DM
|
Stime “Worst-Case” di attenuazione CM-DM |
||||||
|
Stime di Reiezione (Equazione 4—Calcolo Manuale) |
Attenuazione Filtro EMI (Risultati Sim LTspice) |
|||||
|
Scenario |
Gv (dB) a 50 Hz |
Gv (dB) a 60 Hz |
Gv (dB) a 535 kHz |
Gv |
Gv |
Gv (dB) a 535 kHz |
|
Tutti i Componenti 0.1% |
–112,3 |
–110,8 |
–116,6 |
–112,3 |
–110,8 |
–116,7 |
|
Tutti i Resistori 1% |
–97,5 |
–96,0 |
–101,7 |
–97,4 |
–96,0 |
–101,9 |
|
Tutti i Componenti 1% |
–92,3 |
–90,8 |
–96,4 |
–92,2 |
–90,8 |
–96,6 |
|
Tutti i Resistori 1% |
–82,7 |
–81,2 |
–86,2 |
–82,7 |
–81,2 |
–86,7 |
|
Tutti i Resistori 1% |
–77,4 |
–75,9 |
–80,0 |
–77,4 |
–75,9 |
–81,0 |
|
Tutti i Resistori 1% |
–71,7 |
–70,2 |
–72,3 |
–71,7 |
–70,2 |
–74,3 |
Si noti che la tolleranza della costante di tempo RC è raddoppiata per una stima del caso peggiore. In altre parole, se un lato del circuito differenziale è aumentato dell’X per cento, l’altro lato può essere diminuito del X per cento. Ad esempio, se R1 e R2 sono componenti con tolleranza dell’1% e C1 e C2 sono componenti con tolleranza del 10%, il disallineamento della costante di tempo RC nel caso peggiore è del 22%. Un disallineamento di 440 ns (22%) ridurrà la reiezione di modo comune di 35 dB rispetto al riferimento con tolleranza dello 0,1% (ovvero un disallineamento della costante di tempo di 8 ns). Si tratta di una perdita notevole! A seconda del caso d’uso, questo può essere accettabile o meno.
La Figura 10 mostra un grafico della reiezione di modo comune rispetto a delta tau, dove delta tau è il disadattamento della costante di tempo RC. Diversi livelli di tolleranza RC corrispondenti sono evidenziati in rosso accanto all’asse orizzontale inferiore. Per chiarezza, il livello di delta tau di 64 ns corrisponde all’1,6% di tolleranza RC (64 ns/2 µs = 3,2% di disadattamento nel caso peggiore = ±1,6% di tolleranza RC). Concentrandosi sulle pendenze del grafico, la reiezione di modo comune peggiora di 6 dB per ogni raddoppio del disallineamento della costante di tempo RC.
Figura 10. Reiezione CM su delta tau (τ2 – τ1).
Riassunto dei Punti Chiave
-
Prevedere e verificare l’ambiente EMI.
-
Il circuito CM-DM equivalente è un circuito a ponte, che non è lineare.
-
Con una scelta appropriata di CDIFF, il progettista può facilmente approssimare la conversione CM-DM utilizzando l’Equazione 8 e le frequenze d’angolo calcolate.
-
Se CDIFF è grande, il disadattamento di C1 e C2 viene desensibilizzato, così come il delta tau (cioè il disadattamento della costante di tempo RC di modo comune).
-
Con un’approssimazione del primo ordine, la reiezione di modo comune diminuirà di 6 dB per ogni raddoppio del disadattamento RC.
-
Le tolleranze di fabbricazione dei componenti sono solo una parte dell’equazione. Anche la temperatura, la tensione e l’invecchiamento influiscono sul disadattamento dei componenti.
-
Tutti i calcoli si basano sui disadattamenti del caso peggiore. Tutto il resto non fa che migliorare le cose, fino a raggiungere una reiezione di modo comune infinita.
-
Analizzate e comprendete il vostro circuito identificando i compromessi sulle prestazioni e le approssimazioni applicabili. Non progettate per simulazione.
-
Questa analisi può essere estesa alle applicazioni di progettazione AAF.
Messa a Punto del Filtro EMI per Applicazioni ECG
La progettazione del filtro EMI per applicazioni ECG inizia con l’impostazione della larghezza di banda del segnale differenziale. I casi d’uso per il fitness sono tipicamente rivolti alla misurazione della frequenza cardiaca R’-R’, che può essere implementata con una larghezza di banda inferiore (40 Hz), mentre le applicazioni di rilevamento delle aritmie richiedono una larghezza di banda superiore (256 Hz).
In questo esempio, per le applicazioni di rilevamento delle aritmie verrà implementato un filtro EMI con larghezza di banda di 256 Hz. I valori delle resistenze hanno un limite minimo basato sulla conformità alla norma di sicurezza IEC 60601-1. In particolare, una condizione di singolo guasto deve essere limitata a 50 µA CC per la protezione del paziente. Pertanto, se l’IC AFE per ECG (come MAX30001, MAX30003, MAX30005, MAX86176, o MAX86178) è alimentato a 1,8 V, il valore minimo della resistenza deve essere di 36 kΩ (1,8 V/50 µA).
Prima di scegliere il valore della resistenza, è opportuno rivedere l’Equazione 5. La conversione CM-DM può essere diminuita aumentando il denominatore (aumentando la resistenza e mantenendo costante il rapporto CDIFF-CCM). Sebbene questo consenta una certa libertà di progettazione, le resistenze generano il rumore termico Johnson, che può introdurre un errore nel segnale differenziale. Per ridurre al minimo questa fonte di rumore, si consigliano valori di resistenza inferiori al MΩ.
Impostiamo i nostri obiettivi di progetto come segue:
BW del canale differenziale = 282 Hz (tolleranza del 10% rispetto ai 256 Hz nominali).
BW del canale di modo comune = 48,2 kHz (tolleranza del 10% rispetto ai 53,5 kHz nominali, valore inferiore di dieci volte alla banda radio AM più bassa di 535 kHz).
Nota: le ipotesi di tolleranza iniziali sono solo punti di partenza, supponendo che le costanti di tempo RC di modo comune abbiano una tolleranza del 10% circa.
Con condensatori da 10 pF e una fc = 48,2 kHz, il valore di resistenza calcolato sarà di 330,2 kΩ.
Calcolando il valore CDIFF dall’equazione BW in modalità differenziale riportata nella Figura 5, si ottengono 851,3 pF.
Scegliere un valore di resistenza di 330 kΩ, con tolleranza dello 0,1%. La maggiore precisione (tolleranza) è consigliata per una migliore reiezione del modo comune. I condensatori di modo comune possono essere desensibilizzati con una scelta oculata del valore del condensatore differenziale. In questo modo, i due condensatori di modo comune possono avere una tolleranza maggiore, con un conseguente risparmio sui costi.
Nota: quando si utilizzano elettrodi a secco per le misurazioni ECG, l’implementazione del filtro EMI è generalmente sconsigliata. Questo perché il filtro EMI offre un percorso a bassa impedenza rispetto all’impedenza più alta dell’interfaccia elettrodo secco/tessuto. In pratica, il filtro EMI bypassa l’elevata reiezione di modo comune dell’amplificatore di strumentazione nel dispositivo AFE. Senza una corrispondenza estrema in tutte le condizioni ambientali, il filtro EMI può degradare le prestazioni complessive di reiezione di modo comune del sistema.
Purtroppo, i valori calcolati di resistenze e condensatori non sempre corrispondono ai componenti disponibili in commercio. Pertanto, il progettista deve ricercare e selezionare i valori dei componenti più vicini a quelli ottenibili in base a dimensioni, costo, tolleranza, tempo, stress di tensione, invecchiamento, ecc. L’analisi qui riportata considera solo gli effetti degli esempi di tolleranza nominale di fabbricazione. Si raccomanda al progettista di analizzare a fondo il proprio caso d’uso, per tenere conto in modo adeguato di tutte le varianti associate.
Selezione dei seguenti componenti del filtro EMI:
R1 = R2 = 330 kΩ, 0,1%; C1 = C2 = 10 pF*, 10%; CDIFF = 850 pF, 10%.
*L’uso di condensatori di valore inferiore non è consigliato a causa delle capacità parassite della scheda.
Utilizzando l’Equazione 8 e la formula per calcolare l’attenuazione sui fi roll-up e roll-down del primo ordine si ottengono le seguenti caratteristiche del circuito:
BW (CM) ≈ (2π × (330 k)(10 pF)) -1 = 48,2 kHz nominale; intervallo BW (Tol): 43,8 kHz – 53,6 kHz
BW (DM) ≈ (2π × (330 k)(10 pF + 2 × 850 pF)) -1 = 282 Hz nominali; intervallo BW (Tol): da 257 Hz a 313 Hz
Reiezione WC CM a 50 Hz = -74dB
Reiezione WC CM a 60 Hz = -72dB
Reiezione WC CM a 535 kHz = -78dB
Per convalidare i calcoli di cui sopra è stata utilizzata una simulazione spice (i calcoli e le simulazioni sono lasciati al lettore). Per lo scenario peggiore, la simulazione LTspice® ha dato i seguenti risultati:
FH = 49 kHz eFL = 311 Hz
Reiezione WC CM a 50 Hz = -74dB e reiezione WC CM a 60 Hz = -72 dB
Reiezione WC CM a 535 kHz = -78,6 dB*.
*Come accennato in precedenza, la cancellazione dei termini polo/zero introduce un certo errore nell’approssimazione dell’attenuazione ad alta frequenza. In questo caso, la nostra stima si discosta di 0,6 dB a 535 kHz.
Si noti che i livelli di reiezione possono essere migliorati implementando condensatori a tolleranza più stretta. Ciò potrebbe essere giustificato dal fatto che il filtro EMI potrebbe impostare la reiezione di modo comune dell’elettronica di front-end, bypassando essenzialmente la reiezione CM dell’amplificatore FE.
Messa a Punto del Filtro EMI per Applicazioni BioZ
Anche la progettazione del filtro EMI per le applicazioni BioZ inizia con l’impostazione della larghezza di banda del segnale di modo differenziale. Tuttavia, la BioZ prevede l’iniezione di segnali AC nel tessuto corporeo, dove il segnale di ritorno viene analizzato sia per le informazioni in ampiezza che di fase. Pertanto, qualsiasi distorsione di fase del filtro introdurrà un errore nel segnale.
Per evitare la distorsione di fase, si consiglia di impostare la frequenza d’angolo del modo differenziale a diverse decadi di distanza dalla frequenza di pilotaggio. Il circuito BioZ del MAX30001 offre una gamma di segnali di iniezione compresa tra 125 Hz e 131,072 kHz. Poiché la larghezza di banda del modo differenziale non può essere maggiore di quella del modo comune, si imposta l’angolo di frequenza a 535 Hz e si implementa la frequenza d’angolo del modo comune a 53,5 kHz nominali (una decina di volte inferiore alla banda radio AM).
Impostiamo i nostri obiettivi di progetto come segue:
BW del canale differenziale = 595 Hz (tolleranza del 10% rispetto ai 535 Hz nominali).
BW del canale di modo comune = 48,2 kHz (tolleranza del 10% rispetto ai 53,5 kHz nominali, una decade al di sotto della banda radio AM più bassa di 535 kHz).
Nota: le ipotesi di tolleranza iniziali sono solo punti di partenza, supponendo che le costanti di tempo RC di modo comune abbiano una tolleranza del 10% circa.
Con condensatori da 10 pF e una fc = 48,2 kHz, la resistenza sarà di 330,2 kΩ.
Calcolando il valore di CDIFF dall’equazione BW del modo differenziale riportata nella Figura 5, si ottiene 400 pF.
Selezionare i seguenti componenti del filtro EMI:
R1 = R2 = 330 kΩ, 0,1%; C1 = C2 = 10 pF*, 10%; CDIFF = 400 pF, 10%.
*L’uso di condensatori di valore inferiore non è consigliato a causa delle capacità parassite del circuito stampato.
Utilizzando l’Equazione 8 e la formula per calcolare l’attenuazione sulle curve roll-up e roll-down del primo ordine si ottengono le seguenti caratteristiche del circuito:
BW (CM) ≈ (2π × (330 k)(10 pF))-1 = 48,2 kHz nominale; intervallo BW (Tol): 43,8 kHz – 53,6 kHz
BW (DM) ≈ (2π × (330 k)(10 pF + 2 × 400 pF))-1 = 595 Hz nominali; intervallo BW (Tol): 542 Hz – 661 Hz
Reiezione WC CM a 50 Hz = -73,6 Db
Reiezione WC CM a 60 Hz = -72,2 dB
Reiezione WC CM a 535 kHz = -71,2 dB
Per convalidare i calcoli di cui sopra è stata utilizzata una simulazione spice (i calcoli e le simulazioni sono lasciati al lettore). Per lo scenario peggiore, la simulazione LTspice ha dato i seguenti risultati:
FH = 49 kHz eFL = 311 Hz
Reiezione WC CM a 50 Hz = -73,6 dB e reiezione WC CM a 60 Hz = -72dB
Reiezione WC CM a 535 kHz = -72dB*.
*Come già detto, la cancellazione dei termini polo/zero introduce un certo errore nell’approssimazione dell’attenuazione ad alta frequenza. In questo caso, la nostra stima si discosta di 0,8 dB a 535 kHz.
Alcune Considerazioni Finali sul Filtro EMI per Applicazioni BioZ
Quando si progetta il filtro EMI per applicazioni BioZ con frequenze di iniezione del segnale più elevate (superiori a 535 Hz), la reiezione di modo comune della banda radio AM diminuisce. Inoltre, le frequenze di iniezione BioZ più elevate richiedono progetti con valori di resistenza inferiori. Utilizzando un resistore da 36 kΩ, il nostro valore calcolato per la conformità alla norma di sicurezza IEC 60601-1 con un’alimentazione di 1,8 V, si ottiene una larghezza di banda di modo comune di circa 440 kHz con condensatori da 10 pF. Impostando la frequenza d’angolo del modo differenziale due decadi più bassa, si limita la frequenza di iniezione a circa 4 kHz. Frequenze di iniezione BioZ più elevate (ad esempio, la frequenza massima di iniezione del MAX30001 è di 131 kHz) richiedono valori di resistenza inferiori.
CMRR e Conversione CM-DM
CMRR e conversione CM-DM sono inversi l’uno dell’altro. Il CMRR è un termine positivo (normalmente) e la funzione di trasferimento della conversione CM-to-DM è il guadagno del circuito, che di solito è inferiore a 1 V/V (un valore negativo in dB). Tenendo presente che i termini di guadagno nell’espressione CMRR sono solo rapporti tra i segnali di uscita e di ingresso, l’espressione CMRR può essere riorganizzata per illustrare questa relazione nell’Equazione 16.
*Si tratta di VDIFF, RTI (riferito all’ingresso).
Il CMRR è un ottimo parametro per confrontare circuiti alternativi. Pur avendo un suo ruolo, non affronta direttamente il comportamento della conversione CM-DM che si verifica all’interno della funzione di trasferimento del circuito del filtro EMI. In quest’ottica, l’analisi qui presentata è un veicolo migliore per valutare e spiegare le ramificazioni di un filtro EMI sbilanciato.
Conclusione
Questo articolo ha discusso lo studio dell’impiego del filtro CM-to-DM convenzionale, delle sue funzioni e di ciò che non può fare. Riducendo al minimo i calcoli e i grafici di simulazione, ci si è concentrati sull’interpretazione del modello matematico di un filtro EMI sbilanciato. Inoltre, le equazioni sono state semplificate dove necessario, sottolineando i punti di forza che il progettista può utilizzare a proprio vantaggio.
È sorprendente come un circuito così semplice, con soli cinque componenti passivi, possa presentare una tale complessità (quando è sbilanciato).
Contenuti correlati
-
 Guerra alle Interferenze: La Schermatura EMI/RFI Inizia dalla Guarnizione
Guerra alle Interferenze: La Schermatura EMI/RFI Inizia dalla GuarnizioneNel mondo dell’elettronica ad alta frequenza, gli involucri metallici fungono da componenti elettrici attivi. Tuttavia, le giunzioni meccaniche (coperchi, porte, pannelli) creano microscopiche fessure che agiscono come antenne radianti o varchi per le interferenze. Le guarnizioni conduttive...
-
 Empower Semiconductor sarà acquisita da ADI
Empower Semiconductor sarà acquisita da ADIVale 1,5 miliardi di dollari l’acquisizione prevista da parte di Analog Devices (ADI) di Empower Semiconductor. L’operazione, basata su un accordo stipulato tra le due aziende, dovrebbe chiudersi nella seconda metà dell’anno solare 2026 e contribuirà alla...
-
 La nuova connettività audio di ADI
La nuova connettività audio di ADIAnalog Devices (ADI) ha annunciato che la tecnologia A²B 2.0 (Automotive Audio Bus) è entrata pienamente in produzione. A²B 2.0 (serie ADAA245x) amplia la piattaforma A²B esistente, rispondendo a numerosi requisiti richiesti dalla la clientela del mondo...
-
 Gestire la crescente complessità delle architetture radio 5G e 6G
Gestire la crescente complessità delle architetture radio 5G e 6GIn che modo fornitori e operatori possono semplificare la progettazione, accelerare l’implementazione e mettere in sicurezza il futuro delle reti mobili in un’era in cui la maggiore complessità è la nuova normalità? La corsa verso il 6G...
-
 Nuovo impianto in Thailandia per ADI
Nuovo impianto in Thailandia per ADIAnalog Devices (ADI) ha inaugurato un nuovo impianto di produzione in Thailandia che amplia ulteriormente le capacità di manufacturing e test avanzato dell’azienda. La realizzazione della nuova facility si inserisce nella strategia di produzione ibrida di ADI,...
-
 Una nuova sfida di progettazione da element14 Community
Una nuova sfida di progettazione da element14 Communityelement14 Community, in collaborazione con ADI, propone una nuova sfida di progettazione focalizzata sullo sviluppo di prototipi avanzati per la sicurezza e la videosorveglianza smart. L’obiettivo è di realizzare un prototipo, o un banco di test, utilizzando...
-
 Certificazione CC-Link IE TSN per gli IC switch di ADI
Certificazione CC-Link IE TSN per gli IC switch di ADIADIN6310 e ADIN3310 di Analog Devices (ADI) sono i primi IC switch dell’azienda a ottenere la certificazione per switch di Classe B e Classe A dalla CC-Link Partner Association (CLPA) dopo il superamento del “CC-Link IE TSN...
-
 Digikey e il futuro dell’agricoltura
Digikey e il futuro dell’agricolturaDigiKey ha annunciato la quarta stagione della serie video “Coltiva in modo diverso“, supportata da Littelfuse e ADI. La nuova serie propone tre episodi che esaminano come il futuro dell’agricoltura si stia evolvendo attraverso tecnologie basate sui...
-
 Analog Devices ha rilasciato ADI Power Studio
Analog Devices ha rilasciato ADI Power StudioADI Power Studio è un set di strumenti di Analog Devices (ADI) concepito per rispondere alle sempre maggiori sfide di progettazione che si presentano nell’ambito del power management e per snellire le diverse fasi legate allo sviluppo....
-
 ADI inaugura una nuova sede in Italia
ADI inaugura una nuova sede in ItaliaAnalog Devices (ADI) ha inaugurato ufficialmente il 2 ottobre il suo nuovo hub italiano ad Assago. La nuova sede, situata nel business district di Milanofiori Nord, consolida la presenza di ADI nella regione. L’azienda sottolinea che l’apertura di questa...
Scopri le novità scelte per te
-
Guerra alle Interferenze: La Schermatura EMI/RFI Inizia dalla Guarnizione
Nel mondo dell’elettronica ad alta frequenza, gli involucri metallici fungono da componenti elettrici attivi. Tuttavia, le giunzioni...
-
Empower Semiconductor sarà acquisita da ADI
Vale 1,5 miliardi di dollari l’acquisizione prevista da parte di Analog Devices (ADI) di Empower Semiconductor. L’operazione,...

News/Analysis Tutti ▶
-
 Anritsu ha presentato il VNA Tensor
Anritsu ha presentato il VNA TensorAnritsu ha presentato il suo VNA (analizzatore di rete vettoriale) Tensor per l’analisi delle reti...
-
 Una soluzione integrata da Teradyne e Tokyo Electron
Una soluzione integrata da Teradyne e Tokyo ElectronTeradyne ha sviluppato insieme a Tokyo Electron (TEL) una soluzione integrata che combina la...
-
 GlobalFoundries e Qualinx per la produzione di chip europei
GlobalFoundries e Qualinx per la produzione di chip europeiGlobalFoundries (GF) e Qualinx hanno dimostrato che i chip critici dal punto di vista...
Products Tutti ▶
-
 Load switch intelligenti da Diodes
Load switch intelligenti da DiodesDiodes ha ampliato la sua offerta di load switch con il modello DML1012ALDSQ, un...
-
 Microchip rilascia nuovi retimer PCIe 6.0 e CXL 3.1
Microchip rilascia nuovi retimer PCIe 6.0 e CXL 3.1Microchip ha aggiunto alla sua offerta di prodotti per data center i retimer XpressConnect...
-
 Murata: nuovi convertitori DC-DC ad alto isolamento
Murata: nuovi convertitori DC-DC ad alto isolamentoMurata Manufacturing ha annunciato la serie di convertitori DC-DC isolati MGJ1T, una nuova gamma...


{kind=link}