
















 14 / 84
14 / 84

EMBEDDED
64 • MAGGIO • 2017
14
IN TEMPO REALE
|
NOVITÁ/TECNOLOGIE
La topologia HRR utilizzata per lo sviluppo di PKB4413DA è stata introdotta per la prima volta con la
famiglia di dispositivi di fascia alta PKM-NH di Ericsson in formato 1/4 brick.
5
À
Á 4
4
disturbi di potenza sul bus di sistema. Ciò garantisce l’integrità della tensione del bus intermedio all’inter-
no della fascia di tolleranza prevista da coloro che sviluppano l’architettura dei sistemi di potenza.
In grado di assicurare eccellenti prestazioni termiche anche in ambienti particolarmente severi, il conver-
L!--N T)
À
''
4
Á
7
2 5 44
44
'
rame-tellurio garantisce un trasferimento termico ottimale, mentre il modulo è collegato a un dissipato-
re o a uno scambiatore di calore attraverso una piastra (baseplate). Il percorso termico tra i componenti
critici dal punto di vista delle temperature e il baseplate è stato progettato con estrema cura in modo da
'
À
'
alla piastra o al dissipatore di calore.
Il regolatore PKB4413DA è disponibile in formato 1/8 brick standard di dimensioni pari a 58,4x22,7x13,2
mm in versione a fori passanti (through-hole) ed è caratterizzato da un isolamento tra ingresso e uscita
pari a 1.500V(DC). Il modulo prevede numerose funzionalità operative e di protezione degli I/O, tra cui
shutdown (arresto) in presenza di sotto tensioni, avviamento monotonico e controllo remoto, oltre a prote-
zione contro sovra tensione di uscita, sovra temperatura e corto circuiti in uscita. Il dispositivo è conforme
ai requisiti di sicurezza previsti da IEC/EN/UL60950-1 ed è caratterizzato da un MTBF calcolato di 8,5
milioni di ore.
Nuovi orizzonti per la tecnologia
di rilevamento degli ostacoli
Filippo Fossati
Il progetto
Inspex
5 À 4
V *
pone l’obiettivo di sviluppare un sistema per il rilevamento degli ostacoli e l’esplorazione spaziale da uti-
lizzare in tutte le condizioni atmosferiche e di visibilità. In pratica si tratta di adattare la funzione di
rilevamento degli ostacoli, tipica delle automobili a guida autonoma, in modo da poterla sfruttare in appli-
cazioni portatili e indossabili: guida per ipo e non vedenti, robotica e droni. Un sistema di questo tipo potrà
essere utilizzato per rilevare (in tre dimensioni e in tempo
reale), localizzare e inviare avvertimenti circa la presenza di
ostacoli, sia stazionari sia mobili, in tutte le condizioni am-
bientali (fumo, sporcizia, nebbia, forte pioggia, neve). La re-
alizzazione di un sistema di questo tipo richiede la presenza
di un gran numero di sensori quali Lidar, radar Uwb e Mems
a ultrasuoni.
La prima fase di questo progetto prevede la miniaturizzazio-
4
&
À
-
À
' 4
2 *
quindi saranno assemblati insieme a un’unità IMU (Intertial
Measurement Unit), sensori per il rilevamento ambientale,
dispositivi per la comunicazione wireless, circuiti per l’ela-
borazione dei segnali e dei dati, funzioni di data fusion (il
cui compito è sintetizzare i dati provenienti da più fonti per
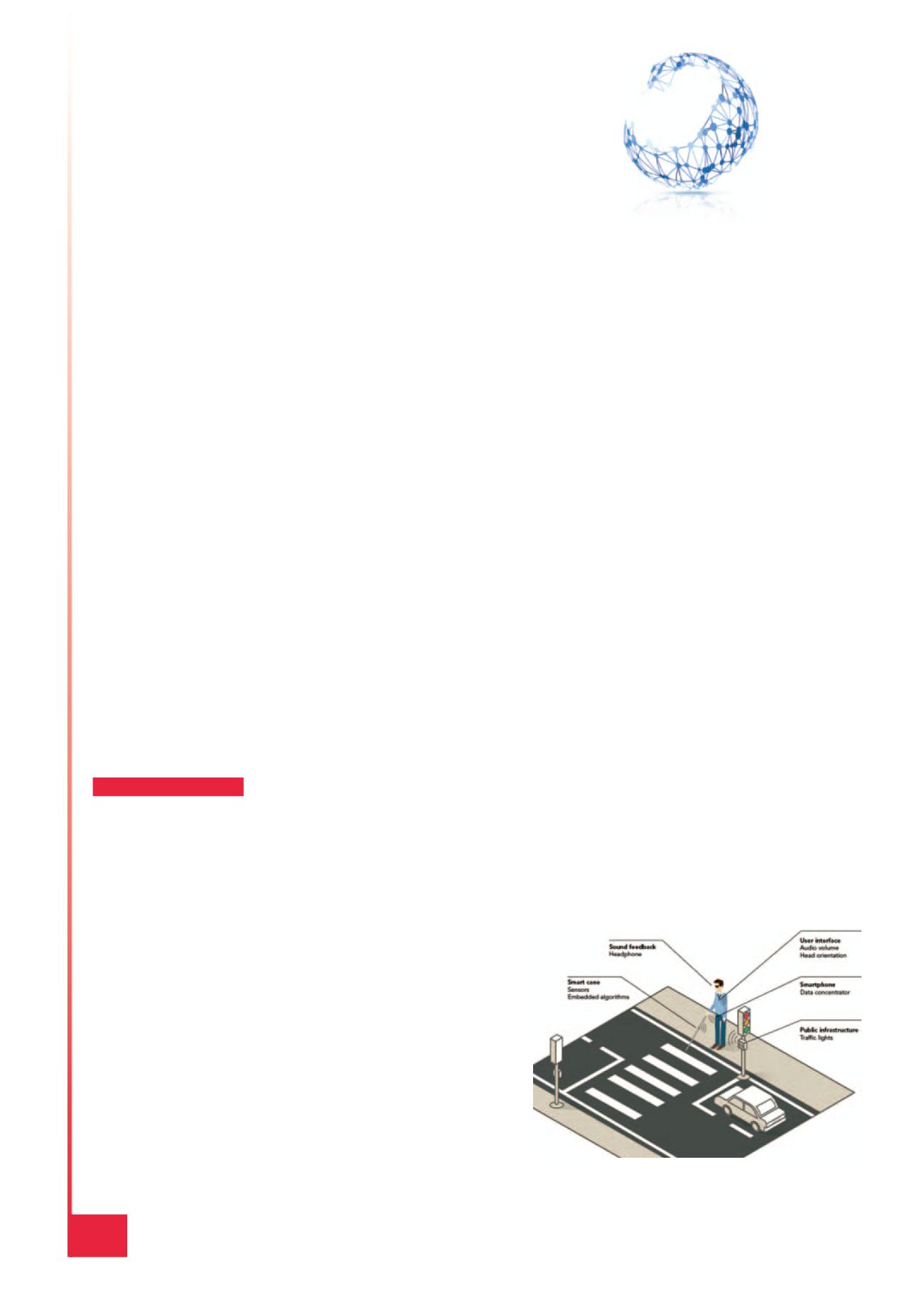
Obiettivo del progetto Inspex è sviluppare un
sistema per l’esplorazione spaziale da utilizza-
re in applicazioni portatili e indossabili