

















 24 / 26
24 / 26

XXIV
Power
POWER 12 - NOVEMBRE/DICEMBRE 2016
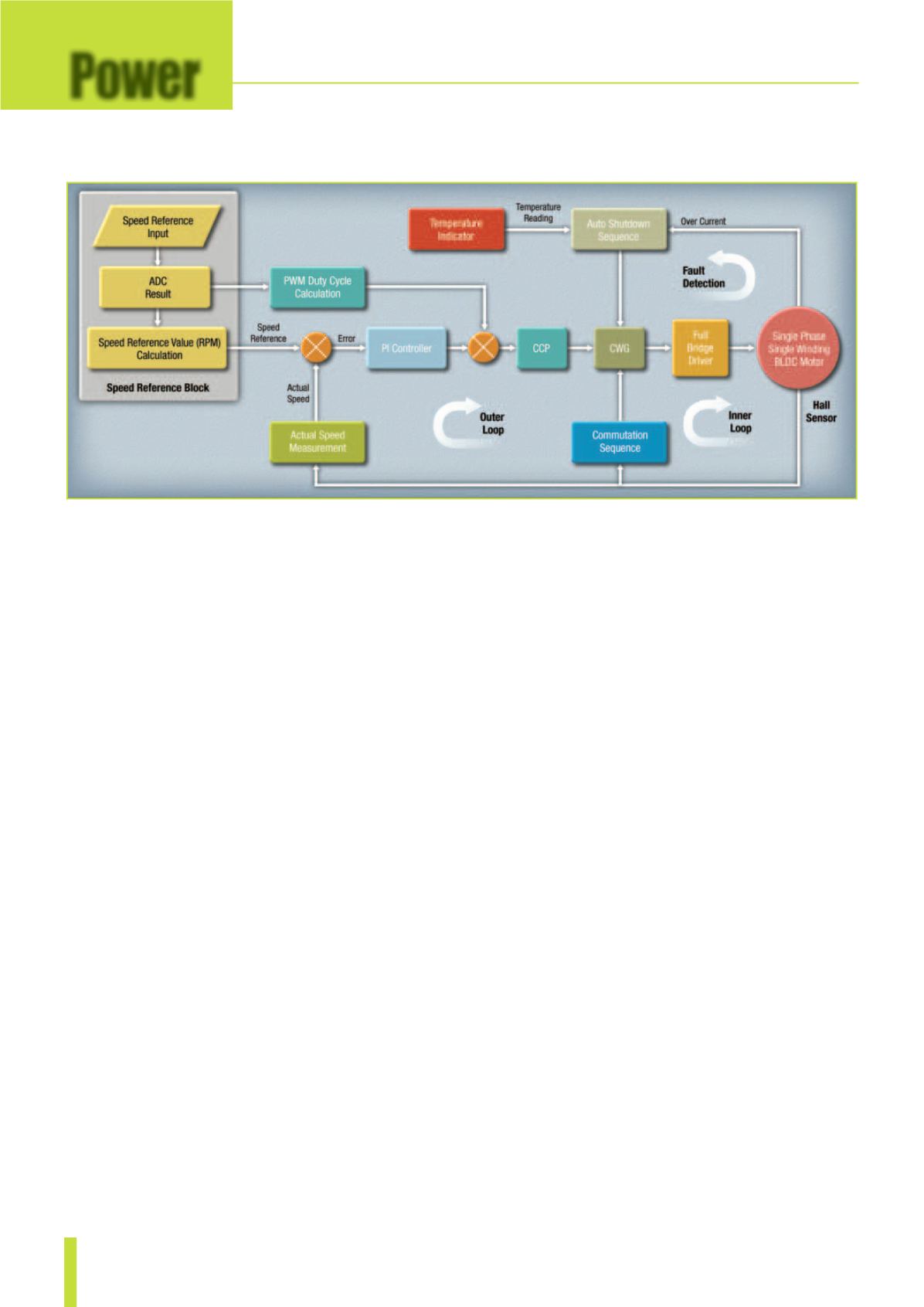
tensione di alimentazione del driver del motore è 9V.
Il riferimento per la velocità può essere costituito da qualsia-
si ingresso analogico. Il modulo ADC del microcontroller è
caratterizzato da una risoluzion a 10 bit e un massimo di otto
canali, caratteristiche che lo rendono idoneo per diversi tipi
di ingressi analogici. Questo viene utilizzato per dedurre il ri-
ferimento di velocità e il duty cycle inizle della modulazione
PWM, utilizzati per inizializzare la velocità del motore sulla
base della sorgente della velocità di riferimento.
Il duty cycle iniziale può essere incrementato, o ridotto
mediante il controllo PI (Proportional-Integral) e il nuo-
vo valore di duty cycle è caricati nel CCP, la cui uscita
PWM viene utilizzata come sorgente iniziale del generato-
re CWG per controllare la modulazione dei commutatori
“low side” del circuito di pilotaggio a ponte intero e quin-
di la velocità del motore.
Anello interno
Il loop di feedback più interno è responsabile del control-
lo della commutazione. L’uscita del generatore CWG, che
controlla l’eccitazione dell’avvolgimento dello statore, di-
pende dallo stato dell’uscita del sensore Hall, che viene
confrontato con un riferimento di tensione fisso (FVR)
dal comparatore. L’isteresi del comparatore è abilitata in
modo da poter trascurare il rumore in uscita dal sensore.
L’uscita del comparatore commuta tra le modalità diret-
ta e inversa del ponte intero per produrre una rotazione
oraria o antioraria. L’uscita del generatore CWG è inviata
all’ingresso dei commutatori del circuito full bridge.
Per produrre un ciclo elettrico deve essere eseguita una
combinazione diretta/inversa. Una rivoluzione meccani-
ca del motore richiede due cicli elettrici, quindi debbono
essere eseguiti due combinazioni diretta/inversa per com-
pletare una singola rotazione in senso orario del motore.
Circuito a ponte intero
Il circuito full-bridge di figura 3 è principalmente compo-
sto da due MOSFET a canale p, che operano come com-
mutatori high-side e due MOSFET a canale n, che ope-
rano come commutatori low-side. Il principale vantaggio
dei transistor a canale p è la semplicità delle tecniche di
pilotaggio del gate nella configurazione high-side switch,
il che si traduce in una riduzione dei costi. Anche se gli
switch high-side e low-side possono essere commutati sul-
lo stato di on allo stesso tempo – conduzione incrociata
– questo tipo di commutazione dovrebbe essere evitato: in
caso contrario questo creerà un fenomeno di shoot-throu-
gh che potrebbe danneggiare i componenti del driver. Per
evitare ciò, può essere implentato un ritardo nella banda
morta (dead-band) utilizzando i registri del contatore
di CWG. Ciò impedisce la sovrapposizione dei segnali di
uscita evitando in tal modo che i commutatori high- e low-
side possano essere nello stato di conduzione nello stesso
momento. Idealmente, i MOSFET a canale p e a canale n
dovrebbero avere le stesse RDSon e carica totale del gate
QG per ottenere prestazioni di commutazione otitmali.
Pertanto, si dovrebeb scegliere una coppia complementa-
re di MOSFET per soddisfare questa esigenza. In realtà ciò
è impossibile, a causa delle differenti modalità costruttive:
la dimensione del chip dei dispositivi a canale p deve esse-
re due o tre volte superiore rispetto a quella degli analo-
ghi dispositivi a canale n per garantire lo stesso valore di
RDSon. A una maggiore dimensione del chip corrisponde
un effetto di QG più marcato. Quindi, nella scelta dei MO-
SFET, è importante decidere se sarà RDSon o QG ad avere
l’impatto più grande sulle prestazioni di commutazione.
Fig. 2 – Schema di controllo del circuito di pilotagio del motore