35
- ELETTRONICA OGGI 434 - MARZO 2014
POWER
SOLARE
razioni di piccole dimensioni, è praticamente impossibile
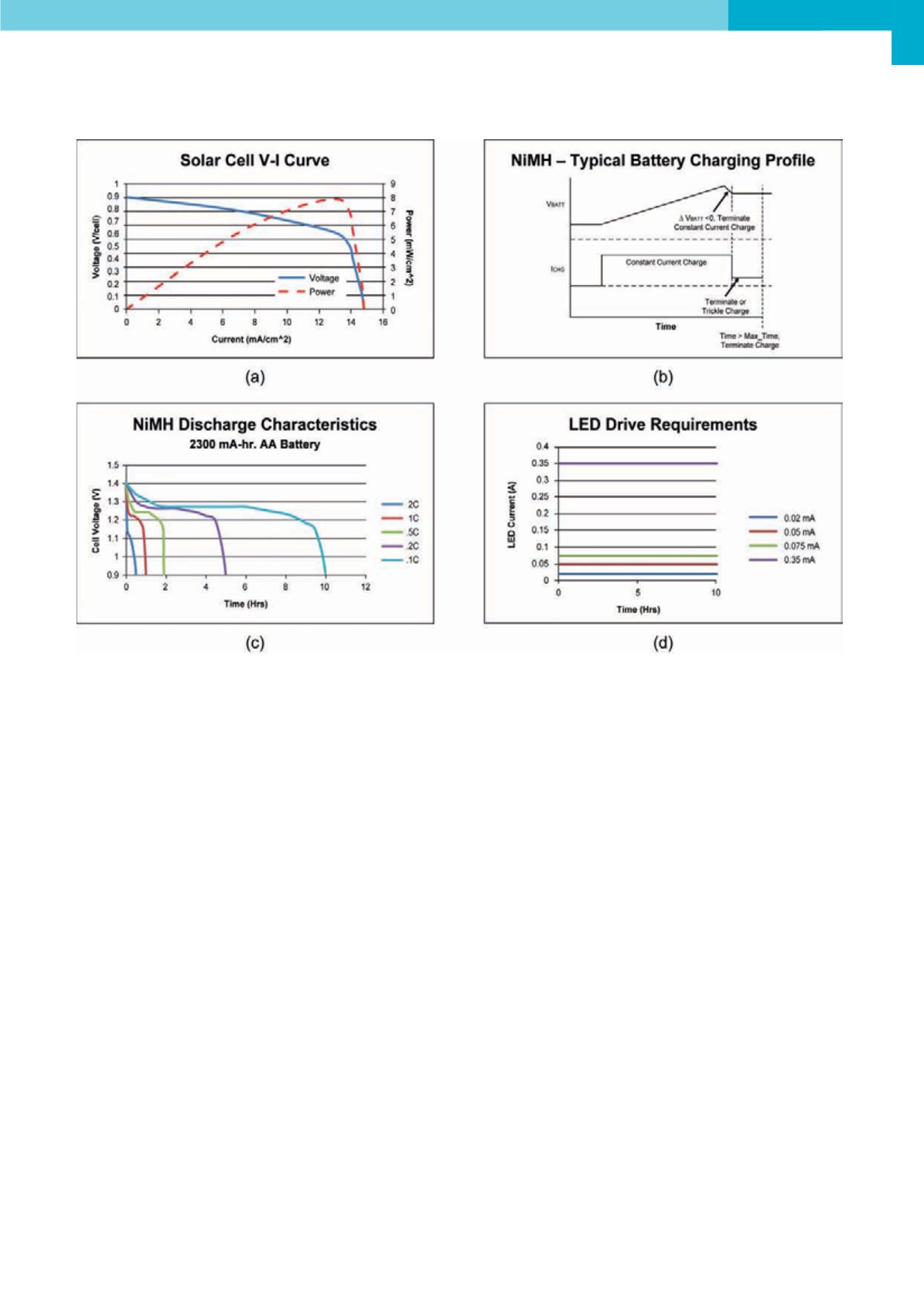
garantire la prestazione. La massima tensione di una cella
solare (per cella) è di circa 1V, mentre le batterie NiMH
operano in un range di tensioni compreso tra 0,9V e 1,4V
e i LED richiedono una sorgente di corrente costante, seb-
bene la loro tensione diretta sia tipicamente sopra i 3V.
Inoltre, le batterie NiMH hanno alcuni specifici requisiti di
carica per prolungare la loro vita utile.
Un sistema che interfaccia tutti questi componenti diretta-
mente ha significative limitazioni, oltre a implicazioni per
quel che concerne l’efficienza generale e la “robustezza”
del sistema. Nella figura 1b è riportato lo schema di un
sistema alternativo che permette di superare tali limita-
zioni. L’interfaccia elettronica di potenza tra ognuno dei
tre elementi fondamentali assicura un grado di flessibilità
molto più elevato, e permette di ottimizzare le prestazioni
del sistema complessivo. Il microcontrollore non è essen-
ziale; un circuito integrato per la carica delle batterie può
soddisfare l’esigenza del profilo di carica delle NiMH,
mentre gli integrati di pilotaggio dei LED possono conver-
tire la tensione della batteria in una sorgente di corrente
costante. Tuttavia, la flessibilità di una configurazione
senza un microcontrollore è limitata; i dispositivi avranno
un range operativo piuttosto ristretto che pregiudica la
capacità di rispondere alle variazioni.
Se la configurazione della cella solare cambia, sarà
necessario sostituire l’integrato per la carica della bat-
teria. Sia l’integrato che carica la batteria sia quello di
pilotaggio del LED dovranno essere sostituiti nel caso
in cui la tecnologia di immagazzinamento dell’energia o
la configurazione vengano cambiati. Infine, se il tipo di
LED o la configurazione vengono cambiati, dovrà essere
riconfigurato l’integrato di pilotaggio del LED. Ovviamente
la flessibilità di uno standard consente risposte più rapi-
de alle variazioni di requisiti e all’affacciarsi di nuove
opportunità. La flessibilità a livello di sistema deriva
dal fatto che la maggior parte dei cambiamenti possono
essere integrati nel microcontroller, senza quindi richie-
dere significativi aggiornamenti hardware che richiedono
l’apporto di modifiche importanti in fase di progettazione
e riqualificazioni. Una soluzione basata su componenti
discreti non sarebbe in grado di supportare il processo
evolutivo senza ottimizzare i componenti del sistema. Un
caricabatteria integrato non sarebbe in grado di ottimizza-
re l’uscita della cella solare in maniera analoga a quanto
farebbe una soluzione integrata in un microcontroller
che può sfruttare anche le potenzialità dell’algoritmo di
Maximum Peak Power Tracking (MPPT).
Suggerimenti di implementazione
Un microcontroller può consentire a un progettista di
sfruttare l’aumento di prestazioni di ognuno dei com-
ponenti core garantendo nel contempo la possibilità di
Fig. 2 – Specifiche V-I dei Componenti e requisiti di pilotaggio


