I display di tipo HUD (Head-Up Display) sono ormai disponibili, come dotazione di serie o sotto forma di optional, in molti modelli di auto di lusso e fanno parte della sempre più nutrita schiera di sistemi avanzati per l’assistenza alla guida (ADAS – Advanced Driver Assistance System). Essi permettono al guidatore di focalizzare la propria attenzione sulla strada piuttosto che guardare gli indicatori del cruscotto. Appositi studi condotti per valutare l’impatto della distrazione del guidatore hanno dimostrato che distogliendo lo sguardo dalla strada per più di due secondi raddoppia il rischio di incidenti.
Fig. 1 – Sistema di proiezione basato su MEMS a scansione laser per display HUD (Head Up Display) utilizzati in applicazioni automotive
Nei display HUD tutte le informazioni basilari per la guida, come la velocità, i segnali di allerta e le frecce sono disponibili sul parabrezza direttamente all’altezza della visuale del guidatore. Uno dei più recenti display HUD utilizza circuiti di pilotaggio per diodi laser per fornire impulsi ai laser RGB (Red, Green Blu) che proiettano il video ad alta risoluzione sul parabrezza (Fig. 1). Questi HUD a realtà aumentata tracciano una freccia trasparente direttamente sulla strada di fronte alla macchina, in modo che i segnali di svolta a colori e le direzione di navigazione siano più facili da seguire. Essi permettono inoltre di evidenziare altri oggetti, come ad esempio pedoni o veicoli che potrebbero rappresentare un pericolo e richiamano quindi su di loro l’attenzione del guidatore.
Obiettivo di questo articolo è dimostrare che un sistema di proiezione basato su MEMS a scansione laser rappresenta una soluzione migliore rispetto ai display HUD basati su LCD (Liquid Crystal Display) e DLP (Digital Light Processing). Inoltre verranno evidenziate le principali caratteristiche di un nuovo circuito di pilotaggio (driver) per diodi laser a quattro canali da utilizzare in questi display HUD della prossima generazione.
{kind=link}
Tre tecnologie a confronto
Il pannello LCD è la tecnologia più comunemente utilizzata per la realizzazione dei sistemi HUD destinati al mondo automotive. Si tratta di schermi che utilizzano una tecnologia trasmissiva e una retroilluminazione a LED per illuminare l’intera immagine quando la luce passa attraverso lo schermo. L’immagine illuminata è ingrandita, riflessa da uno specchio pieghevole e focalizzata sul parabrezza di fronte al campo visivo del guidatore.
I pixel scuri di un display HUD di tipo LCD vengono creati mediante il blocco della retroilluminazione in modo che la trasmissività dell’LCD risulti inferiore per quei determinati pixel. In ogni caso, la luce non può essere completamente bloccata, specialmente nel caso di impostazioni che prevedono una bassa luce ambientale. Il risultato è un’immagine proiettata sullo schermo che assomiglia a una cartolina trasparente di dimensioni rettangolari (si faccia riferimento alla Fig. 2). Per i costruttori di automobili ciò rappresenta un grave rischio per la sicurezza in quando il rettangolo illuminato è fonte di distrazione per il conducente.
Un display DLP è simile a un display LCD rispetto al quale garantisce una migliore risoluzione. Questo tipo di display è composto da migliaia di micro-specchi disposti in una matrice bidimensionale (2D). Ogni specchio della matrice funziona come pixel e ogni specchio è modulato in modo da riflettere la luce incidente per creare l’intensità del pixel desiderata. Un pixel con luminosità al 100% avrà una modulazione nulla, mentre un pixel scuro avrà uno specchio predisposto in modo tale da riflettere la luce al di fuori del percorso di visualizzazione.
Al fine di fornire un’immagine uniforme, la sorgente luminosa incidente è raccolta e focalizzata sulla matrice 2D con un’intensità uguale su ciascun pixel. L’immagine riflessa viene quindi ingrandita, rifocalizzata e proiettata su uno specchio pieghevole e successivamente sul parabrezza, seguendo un procedimento simile a quello utilizzato per l’implementazione di un display HUD di tipo LCD.
Un display DLP è un pannello rettangolare che richiede una superficie orizzontale piatta per proiettare l’informazione. I parabrezza, è risaputo, sono relativamente piatti in direzione verticale ma non in quella orizzontale. Ne consegue che per consentire l’inserimento di informazioni in un DLP i progettisti devono usare ottiche asferiche per garantire l’adattamento alle curve del parabrezza stesso, con conseguente incremento delle dimensioni del sistema HUD.
Rispetto ai sistemi DLP, un sistema di proiezione che utilizzano la scansione laser basata su MEMS sfrutta l’immagine deformata dello specchio di scansione, consentendo l’uso di ottiche più economiche per ridurre il costo della componente elettro-meccanica del sistema. I principali componenti di un sistema a scansione laser basato su MEMS sono il circuito di pilotaggio del diodo laser, i diodi laser, alcune ottiche di piccole dimensioni per l’allineamento e la modellazione (shaping) del fascio, oltre allo specchio MEMS oscillante e la relativa elettronica di controllo. I diodi laser a colori RGB sono impulsati in modo sincrono mentre lo specchio è scansionato attraverso il campo di visualizzazione. L’immagine è quindi trasferita pixel per pixel attraverso il campo di visualizzazione che è sovrapposto sul parabrezza.
{kind=link}
In un proiettore a scansione laser basato su MEMS ogni pixel viene impulsato ad alta velocità per generare una risoluzione full HD. Poiché il fascio laser è sempre focalizzato, l’immagine può essere proiettata sul parabrezza senza richiedere l’uso di ottiche per la rifocalizzazione. Ciò contribuisce a ridurre sensibilmente la complessità e le dimensioni del sistema ottico complessivo, eliminando anche il ricorso a componenti ottici costosi e alle relative operazioni di assemblaggio.
I sistemi di proiezione a scansione laser basati su MEMS garantiscono una migliore efficienza elettrica rispetto ai sistemi di proiezione “frame-based” (ovvero che utilizzano fotogrammi) di tipo LCD o DLP.
{kind=link}
A differenza di un proiettore frontale dove l’intero display è riempito con una presentazione, le informazioni relative alla strumentazione e alla navigazione di un display HUD per uso automotive non riempiono l’intera area di visualizzazione.
Il display HUD infatti presenta informazioni critiche sotto l’aspetto temporale sul parabrezza per un periodo di breve durata. Queste informazioni ricavate utilizzando la realtà aumentata si presentano sotto forma di un’immagine in cui il 70% dei pixel è spento. I rettangoli rossi visibili nelle figure 3a e 3b mostrano le aree di un display HUD all’interno delle quali il sistema di proiezione deve essere in grado di riprodurre le informazioni relative alla navigazione. Si noti la quantità di pixel accessi in confronto alla quantità di pixel spenti in ciascuno dei due esempi. A secondo del tipo di informazione questo rapporto tra pixel accesi e spenti (pixel ON: pixel OFF) può variare da 1:3 to 1:6.
In un display DLP di tipo “frame-based”, indipendentemente dal numero di pixel che sono accesi, la sorgente luminosa deve riempire l’intera matrice di pixel. Nell’esempio di figura 3a, la luce per i pixel scuri (o non accesi) nell’area di visualizzazione delimitata dal rettangolo bordato di rosso viene generata e quindi “scartata” riflettendola lontana dalla zona di visualizzazione oppure bloccandola.
Si tratta quindi di energia consumata che contribuisce a ridurre l’efficienza del sistema del display HUD. Senza dimenticare che questa energia sprecata contribuisce ad aumentare il calore generato a causa dell’assorbimento della luce che viene reindirizzata e a incrementare il costo dell’energia elettrica necessaria per generare la luce. Questi due fattori aumentano gli oneri legati al raffreddamento dei sistemi “frame-based” e la quantità di energia elettrica richiesta.
Per contro un display HUD a scansione laser basato su MEMS richiede potenza elettrica solamente nel momento in cui ci sono pixel “utili” che devono essere proiettati. Facendo riferimento alle informazioni relative alla strumentazione e alla navigazione riportate nelle figure 3a e 3b, la maggior parte dell’energia elettrica viene consumata quando è necessario posizionare un pixel sul display. Ciò contribuisce a ridurre notevolmente la quantità di energia richiesta, con tutti i vantaggi che ciò comporta in termini di profilo termico e dissipazione. Poiché un display HUD a scansione laser basato su MEMS integra l’elettronica di pilotaggio, sarà anche contraddistinto da ingombri inferiori rispetto ai display HUD di tipo “frame based”.
{kind=link}
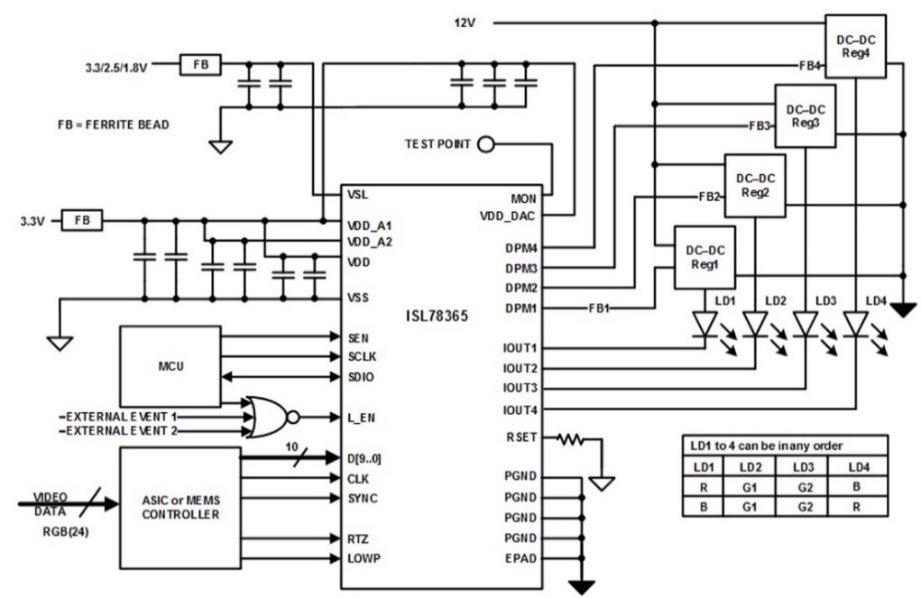
Fig. 4 – Il driver per laser ISL78365 a quattro canali è in grado di fornire una corrente impulsiva a quattro diodi laser a elevate intensità
Driver per diodi laser per i display HUD della prossima generazione
I sistemi HUD della prossima generazione possono far ricorso al driver per diodi laser a quattro canali ISL78365 di Intersil per fornire informazioni video in realtà aumentata al parabrezza di un’automobile. Questo driver per laser include un’interfaccia che si integra con il circuito ASIC per il pilotaggio dei MEMS per generare un sistema di proiezione a scansione laser compatto (Fig. 4).
Il nuovo ISL78365 prevede quattro circuiti in grado di assorbire una corrente (sink current) di 750 mA ad alta velocità programmabili per regolare la corrente e l’uscita ottica di un massimo di quattro diodi laser. Grazie a tempi di salita e di discesa di 1,5 ns, è possibile ottenere video a colori ad alta definizione caratterizzati da un’elevata frame rate (velocità di cattura/riproduzione dei fotogrammi), come visibile in figura 5.
Questo laser driver garantisce impostazioni indipendenti per quanto riguarda il colore, la soglia e la scala per ciascuno dei quattro circuiti per l’assorbimento di corrente, mentre l’interfaccia video parallela ad alta velocità supporta una proiezione full HD e velocità di pixel (pixel rate) fino a 150 MHz o 1.900 pixel per linea. La multiplazione dei dati dei pixel contribuisce inoltre a semplificare il layout della parte elettronica e opto-meccanica.
{kind=link}
Fig. 5 – I display HUD a scansione laser presentano le informazioni con risoluzione full HD direttamente all’altezza della visuale del guidatore
La gestione dinamica della potenza per ciascuna alimentazione dei diodi laser e la presenza di tre modalità di risparmio energetico permettono di ridurre i consumi di potenza del sistema durante l’intervallo di soppressione (blanking). La funzionalità RTZ (Return To Zero ) programmabile permette di eliminare il fenomeno di speckle (la superficie appare coperta da molti puntini luminosi intervallati da zone nere), mentre una protezione programmabile contro le sovratemperature consente di personalizzare le prestazioni termiche.
In conclusione, un sistema di proiezione a scansione laser basato su MEMS risulta più adatto per l’uso in display HUD a realtà aumentata rispetto ai sistemi “frame based” che utilizzano display LCD o DLP. Mentre un’immagine scansionata tramite laser del display HUD richiede che solamente una percentuale compresa tra il 25 e il 30% dei suoi pixel siano accessi, i display HUD di tipo LCD o DLP richiedono il pilotaggio di tutti i pixel di immagine per generare la stessa luminosità.
Nei sistemi DLP e LCD, quindi, la luce e la potenza impiegate per visualizzare i pixel scuri vanno sprecate. Ciò dà origine a un puntino caratterizzato da una luminosità non elevata laddove si dovrebbe trovare l’area formata dai pixel scuri. Durante il giorno ciò potrebbe non rappresentare un problema, ma durante la notte questo effetto è molto più evidente. Esso rappresenta un’altra fonte di distrazione per il guidatore e segna dunque un punto a favore dei costruttori di automobili che utilizzano un sistema di proiezione a scansione laser basato su MEMS per i loro display HUD della prossima generazione.