Grazie a due fattori, l’avvento di nuove tecnologie e l’evoluzione di quelle più datate, che sono divenute via via più economiche e caratterizzate da ingombri e consumi ridotti, il numero di opzioni attualmente disponibili per effettuare operazioni di rilevamento è in continua espansione. I sensori di prossimità non sono rimasti insensibili a questo fenomeno e sul mercato è presente una gamma veramente ampia di sensori caratterizzati da principi di funzionamento che differiscono radicalmente gli uni dagli altri. Anche se la disponibilità di un gran numero di opzioni può rappresentare un vantaggio, è senza dubbio utile analizzare le modalità che un progettista deve seguire per determinare la scelta della tecnologia più adatta per applicazioni di rilevamento, misura della distanze e prossimità.
Sensori di prossimità: principi di base
L’utilizzo di un sensore di prossimità permette di valutare, senza necessità di un contatto, la presenza o l’assenza di un oggetto oppure di effettuare misure precise e accurate della distanza esatta a cui si trova l’oggetto. Il termine sensore di prossimità è abbastanza generico in quanto fa riferimento a una gamma molto ampia di dispositivi che differiscono anche sensibilmente in termini sia di dimensioni sia di distanza di rilevamento. In questo blog l’attenzione sarà focalizzata sui più diffusi sensori di prossimità che possono venire integrati in sistemi embedded fissi di piccole dimensioni o portatili. Tra questi si possono annoverare sensori a ultrasuoni, fotoelettrici, induttivi e telemetri laser, che risultano in generale adatti per il rilevamento di distanza che vanno da pochi centimetri ad alcune decine di metri. I sensori capacitivi e a effetto Hall, pur essendo sensori di prossimità particolarmente efficienti, sono più indicati per il rilevamento a distanze molto più ravvicinate e non saranno quindi presi in considerazione.
Alcune considerazioni di progetto
Non esiste un sensore di prossimità in grado di espletare tutti i compiti in un modo migliore rispetto agli altri, anche non tenendo in considerazione il fattore costo. Per tale motivo, nel momento in cui ci si accinge a scegliere il sensore di prossimità più adatto per la particolare applicazione considerata, sono numerosi gli elementi da tenere in considerazione e da valutare in base alla loro importanza. Questi sono:
- Costo: non sono molti i progetti che possono permettersi di ignorare il costo dei componenti e i sensori di prossimità possono rappresentare una piccola quota del budget totale come pure la maggior parte.
- Raggio d’azione: mentre alcuni particolari prodotti possono variare il loro raggio d’azione, sussistono limitazioni di carattere generale imposte dalle tecnologie dei sensori di prossimità relativamente alle distanze minime e massime che sono in grado di rilevare.
- Dimensioni: nella progettazioni di soluzioni embedded si tratta di un aspetto molto importante da tenere in considerazione, in quanto i sensori di prossimità possono avere dimensioni che variano da quelle di un chicco di riso a ingombri che richiedono il trasporto da parte di una persona.
- Velocità di aggiornamento (refresh rate): poiché il funzionamento della maggior parte dei sensori di prossimità richiede l’emissione di un segnale e il rilevamento di un segnale di ritorno, si vengono a creare limitazioni di natura fisica relative alla frequenza di aggiornamento, denominata appunto “refresh rate”.
- Effetto del materiale: alcuni sensori si comportano in maniera differente con superfici dure rispetto a quelle fibrose, mentre altri hanno un diverso comportamento in base al colore dell’oggetto.
Sensori di prossimità a ultrasuoni
I sensori a ultrasuoni utilizzano impulsi a ultrasuoni per rilevare la presenza di un oggetto oppure, a fronte di un’ulteriore elaborazione, la distanza dall’oggetto. Per funzionare, questi sensori utilizzano sia un trasmettitore sia un ricevitore e sfruttano i principi dell’eco-localizzazione. Mediante l’emissione di un chirp (segnali in cui la frequenza varia in maniera lineare con il tempo) e la misura del tempo che intercorre tra il momento in cui questo chirp viene riflesso da una superficie e ritorna, un sensore a ultrasuoni è in grado di misurare la distanza da un oggetto (Fig. 1). Anche se spesso mostrati in una configurazione che prevede trasmettitore e ricevitore posizionati il più vicino possibili tra di loro, i principi esposti sono validi anche quando questi due componenti sono separati. Da segnalare anche la disponibilità di transceiver a ultrasuoni che abbinano le funzioni di trasmissione e ricezione in un unico package.
{kind=link}
Fig. 1 – Principio di funzionamento di un sensore a ultrasuoni
La rilevazione a ultrasuoni è abbastanza accurata ed è caratterizzata da una velocità di aggiornamento ragionevole, con una frequenza di invio che va dalle decine alle centinaia di chirp al secondo. Essendo il principio di funzionamento basato sul suono e non su onde elettromagnetiche, colore e trasparenza dell’oggetto non hanno effetto alcuno sulle letture. Per questo stesso motivo essi non richiedono o producono luce, risultando quindi ideali per l’uso in ambienti che sono naturalmente bui o è necessario che lo siano. Le onde sonore, inoltre, si diffondono col passare del tempo, incrementando in tal modo la loro area di rilevamento: ciò può rappresentare un vantaggio o uno svantaggio in funzione della particolare applicazione considerata. Grazie alla semplicità del loro progetto, questi sensori sono economici, versatili e sicuri.
In ogni caso i sensori a ultrasuoni presentano anche alcuni svantaggi specifici. Il sensore a ultrasuoni è composto a due parti, il trasmettitore e il ricevitore, che possono presentarsi sotto forma di una singola unità oppure come dispositivi separati. Poichè la velocità del suono muta con le variazioni di temperatura, brusche variazioni di temperatura possono influenzare la precisione. Questo effetto può essere compensato mediante misure di temperatura da utilizzare per aggiornare i calcoli. Anche i materiali soffici possono influenzare l’accuratezza in quanto queste superfici assorbenti possono causare difficoltà in termini di riflessione. Anche se il concetto è assimilabile a quello del sonar, è bene tener presente che i sensori a ultrasuoni non sono progettati per l’uso sott’acqua. Essendo basati su onde sonore, i sensori a ultrasuoni non possono essere utilizzati nel vuoto, un ambiente dove non esiste un mezzo per la trasmissione del suono.
Sensori di prossimità fotoelettrici
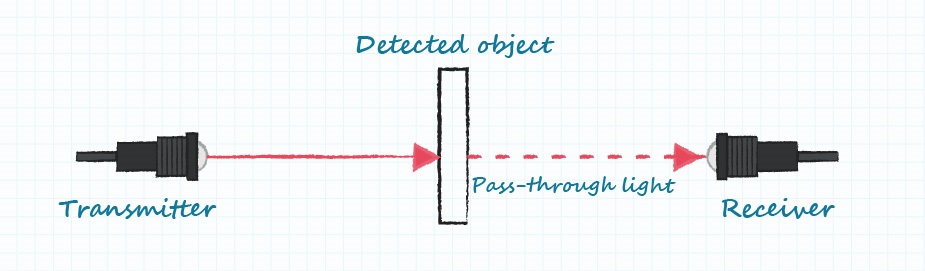
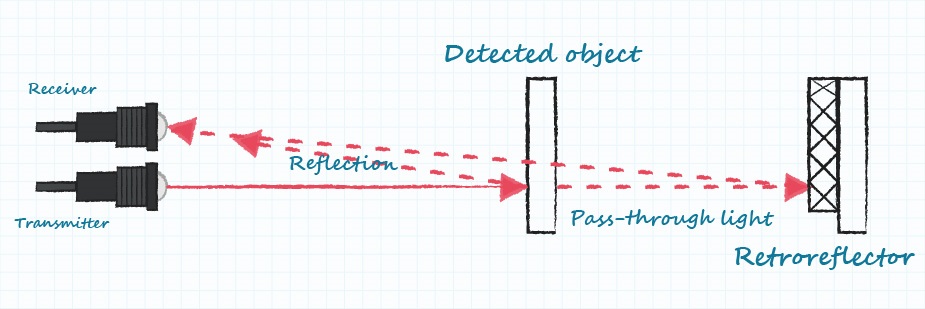
I sensori fotoelettrici sono particolarmente efficaci per la rilevazione dell’assenza o della presenza e sebbene ideali per numerosi impieghi industriali, di solito vengono impiegati in ambito commerciale e residenziale in applicazioni quali porte per garage o conteggio delle persone presenti in un negozio. In termini di implementazione, per i sensori fotoelettrici sono possibili diverse configurazioni. La configurazione a raggio passante (through- beam) prevede un emettitore da un lato e un un ricevitore dall’altro lato dell’oggetto e la rilevazione è determinata da un’interruzione del fascio (Fig. 2). Nella configurazione a riflessione, emettitore e ricevitore sono affiancati mentre un riflettore posto sul lato opposto dell’oggetto fa rimbalzare il fascio proveniente dall’emettitore verso il ricevitore (Fig. 3). Una terza configurazione prevede invece la presenza di emettitore e ricevitore affiancati ma, in questo caso, la luce emessa è riflessa da qualsiasi superficie vicina, in modo analogo a quello che avviene per i sensori a ultrasuoni, ma senza la possibilità di calcolare la distanza (Fig. 4).
{kind=link}
Fig. 2 – Sensore fotoelettrico di tipo a fascio passante
{kind=link}
Fig. 3 – Sensore fotoelettrico a riflessione
{kind=link}
Fig. 4 – Sensore fotoelettrico a riflessione diffusa
Solitamente i sensori fotoelettrici sono caratterizzati da una lunga durata grazie all’assenza di parti in movimento e possono rilevare una vasta gamma di materiali, anche se quelli trasparenti e l’acqua possono provocare problemi. Le configurazioni a fascio passante e a riflessione sono caratterizzati da lunghe distanze di rilevamento e tempi di risposta veloci. La configurazione a riflessione diffusa è in grado di rilevare oggetti di piccole dimensioni e può essere utilizzata su rilevatori mobili. Finché le lenti non vengono contaminate, è possibile l’utilizzo in ambienti sporchi tipici di molte applicazioni industriali. Tuttavia la loro capacità di misurare la distanza da un oggetto è molto limitata e possono sorgere problemi con il colore e la riflettività dell’oggetto. E’ anche utile sottolineare che nel caso di configurazioni a fascio passante e a riflessione è necessario procedere al montaggio e all’allineamento, ragion per cui l’installazione del sistema può risultare complicata in ambienti molto “affollati”.
Telemetri laser
La telemetria laser è una tecnologia che solo in tempi recenti è diventata un’alternativa valida, in termini di costi, per molte applicazioni. La telemetria laser è basata sugli stessi principi dei sensori a ultrasuoni e utilizza un fascio elettromagnetico invece di onde sonore. A causa della velocità notevolmente superiore della luce, il calcolo del tempo di volo richiede una notevole precisione per cui a volte si ricorre ad altri metodi, come l’interferometria, al fine di ridurre i costi pur mantenendo un’elevata accuratezza (Fig. 5). Questi sensori possono eseguire misure su lunghe distanze, dell’ordine delle centinaia o migliaia di metri e, in base alle varie opzioni disponibili, sono in grado di garantire tempi di risposta estremamente ridotti.
{kind=link}
Fig. 5 – Esempio di implementazione di un telemetro laser per misure interferometriche della distanza
Nonostante la riduzione dei prezzi, questa tecnologia resta una delle opzioni più costose disponibili, con prezzi di parecchi ordini di grandezza superiori rispetto a quelli delle tipologie di sensori esposte finora. La maggior potenza richiesta per far funzionare il laser da un lato limita la durata nelle applicazioni portatili e dall’altro può far insorgere problemi legati alla sicurezza degli occhi. Data la presenza di un laser, vi è una certa dispersione all’aumentare della distanza e in ogni caso l’area di rilevamento è relativamente ridotta. A ciò va aggiunto il fatto che questa tecnologia non è adatta all’uso con acqua e vetro, fatto questi che ne limita ulteriormente il campo di utilizzo.
Sesnori induttivi
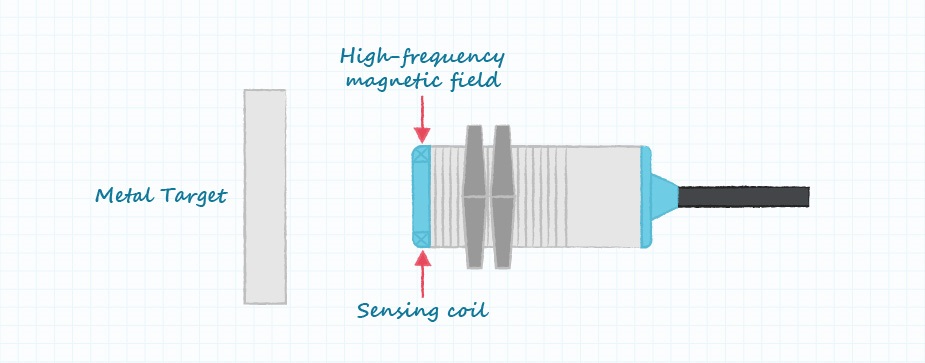
Anche se basati su un concetto datato, i sensori induttivi hanno conosciuto una buona diffusione negli ultimi anni. Rispetto alle altre tipologie di sensori fin qui descritti, i sensori induttivi operano solo in presenza di oggetti metallici. Così come la rotazione di un magnete all’interno di una bobina rappresenta il meccanismo base per la generazione di una corrente elettrica, un sensore induttivo viene utilizzato per creare un campo magnetico e quindi rilevare le variazioni nel campo magnetico nel momento in cui un oggetto metallico passa attraverso il campo stesso (Fig. 6). Questo è il principio base di qualsiasi metal detector.
{kind=link}
Fig. 6 – Tipica applicazione di un sensore induttivo
In base al setup utilizzato, il range di rilevamento può essere estremamente ridotto, come nel caso di applicazioni che prevedono il conteggio della rotazione di un ingranaggio mediante il rilevamento della presenza o meno di un dente dell’ingranaggio in prossimità del sensore. Nel caso di distanze maggiori, i sensori induttivi possono essere celati nel manto stradale per rilevare i veicoli che vi passano sopra o addirittura ottimizzati per rilevare il plasma spaziale. In ogni caso, quando agiscono alla stregua di sensori di prossimità elettronici, i sensori induttivi sono utilizzati in intervalli che vanno dal millimetro al metro. Grazie al loro principio di funzionamento, essi operano meglio con materiali ferrosi, come ferro e acciaio, con un range di rilevamento ridotto per materiali metallici di tipo non magnetico. Poichè questi sensori si basano sulla variazione dei campi elettromagnetici, la velocità di aggiornamento risulta particolarmente elevata.
I sensori induttivi sono estremamente flessibili in termini di distanza di rilevamento e di applicazioni e, dal punto di vista concettuale, molto semplici da utilizzare. Questa intrinseca semplicità ne fa dei componenti relativamente poco costosi anche se la loro la loro potenzialità in termini di rilevamento sono ridotte e risultano molto sensibili alle interferenza prodotte da una vasta gamma di sorgenti.
Confronto tra le diverse tecnologie di sensori di prossimità
{kind=link}
Conclusioni
Esistono numerose opzioni per quel che riguarda i sensori di prossimità e in questo blog sono state esaminate alcune tra le più diffuse per misure su distanze medio-grandi. Nel momento in cui si prendono in considerazione costi e problematiche di installazione, i sensori a ultrasuoni rappresentano molto spesso la soluzione migliore. Ciò grazie al loro costo ridotto, alla capacità di rilevare sia presenza sia distanza e alla semplicità d’uso. Per questo motivo i sensori a ultrasuoni sono molto diffusi e utilizzati in numerose applicazioni in ambito sia domestico sia industriale.
Ulteriori risorse