Di Jason Kelly
Motori CC brushless
I motori elettrici a corrente continua brushless (o motori BLDC) sono motori a commutazione elettronica pilotati da una fonte elettrica CC tramite un controller esterno per motori. A differenza dei loro parenti a spazzole, i motori BLDC si affidano a controller esterni per ottenere la commutazione. In parole povere, la commutazione è il processo di commutazione della corrente nelle fasi del motore per generare movimento. Mentre i motori a spazzole dispongono, appunto, di spazzole fisiche per ottenere questo processo due volte per rotazione, i motori BLDC ne sono sprovvisti, ecco perché questo nome. Per via dei loro presupposti di progettazione, i secondi possono presentare un numero qualsiasi di coppie di poli per la commutazione.
I motori BLDC offrono vantaggi significativi rispetto ai motori a spazzole tradizionali. In genere, i motori brushless assicurano un aumento dell’efficienza del 15-20%, richiedono meno manutenzione (mancando le spazzole, se ne elimina anche l’usura) e offrono una curva di coppia piatta a tutte le velocità nominali. Sebbene i motori BLDC non rappresentino una nuova invenzione, l’adozione su larga scala è stata lenta a causa della necessità di complicati circuiti di controllo e retroazione. Tuttavia, i recenti progressi nella tecnologia dei semiconduttori, le migliori prestazioni garantite dai magneti permanenti e la crescente domanda di maggiore efficienza hanno portato i motori BLDC a sostituire i motori a spazzole in molti campi. I motori BLDC hanno trovato la loro nicchia in molti settori, tra cui: elettrodomestici, automotive, aerospaziale, industria dei beni di consumo, medicale, apparecchiature e strumentazione di automazione industriale.
Con l’industria che si muove in una direzione che richiede motori BLDC in più applicazioni, molti ingegneri si trovano a dover passare a questa tecnologia. Mentre gli elementi di base della progettazione del motore sono ancora validi, l’introduzione di circuiti di controllo esterni ha aggiunto all’equazione un’altra serie di considerazioni di carattere progettuale. Tra i quesiti di progettazione, figura il quesito su come si possa ottenere una retroazione per la commutazione del motore.
Basi della commutazione del motore BLDC
Prima di approfondire le opzioni di feedback per i motori BLDC, è importante comprenderne innanzitutto la loro necessità. I motori BLDC sono disponibili in configurazioni monofase, bifase e trifase; quest’ultima rappresenta la configurazione più comune. Il numero di fasi corrisponde al numero di avvolgimenti sullo statore, mentre i poli del rotore possono presentare qualsiasi numero di coppie a seconda dell’applicazione. E poiché il rotore di un motore BLDC è influenzato dalla rotazione dei poli dello statore, la posizione dei poli deve essere monitorata per alimentare le tre fasi del motore in modo efficace. Quindi, il controller del motore viene utilizzato per generare un modello di commutazione a sei fasi sulle tre fasi del motore. Queste sei fasi, o fasi di commutazione, spostano un campo elettromagnetico che fa sì che i magneti permanenti del rotore muovano l’albero del motore.
{kind=link}
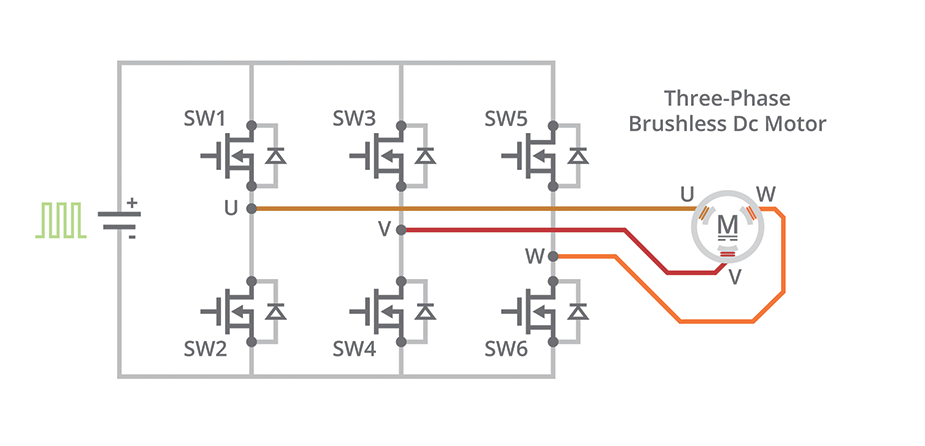
Modello a sei fasi per la commutazione del motore BLDC
Attraverso questa sequenza di commutazione standard, il controller del motore può quindi utilizzare un segnale a modulazione di larghezza d’impulso (PWM) per ridurre efficacemente la tensione media osservata dal motore, variandone così la velocità. Tale configurazione assicura anche una grande flessibilità nella progettazione, dal momento che consente di utilizzare una sorgente di tensione per un’ampia gamma di motori anche nel caso in cui la fonte di tensione CC sia molto più grande della tensione nominale del motore. Affinché questo sistema mantenga i suoi vantaggi in termini di efficienza rispetto alla tecnologia a spazzole, è necessario un ciclo di controllo molto stretto tra il motore e il controller.
È qui che la tecnologia di retroazione diventa importante; affinché mantenga un controllo accurato del motore, il controller deve sempre conoscere l’esatta posizione dello statore rispetto al rotore. Qualsiasi disallineamento o cambiamento di fase nella posizione prevista ed effettiva può comportare un comportamento indesiderato e un calo delle prestazioni. Ci sono molti modi per ottenere questa retroazione per la commutazione dei motori BLDC, ma i più comuni sono sensori a effetto Hall, encoder o resolver. Inoltre, alcune applicazioni si basano su tecniche di commutazione senza sensori.
Feedback di posizione
Sin dall’introduzione del motore brushless, i sensori ad effetto Hall sono stati il cavallo di battaglia per il feedback di commutazione. Per il controllo trifase sono necessari solo tre sensori e, con un costo unitario molto basso, costituiscono sicuramente l’opzione più economica per ottenere la commutazione in termini di costi di distinta base. I sensori Hall sono incorporati nello statore del motore per rilevare la posizione del rotore, a cui si fa ricorso per commutare i transistor nel ponte trifase per azionare il motore. Le tre uscite del sensore a effetto Hall sono comunemente indicate come canali U, V e W. Sebbene costituiscano una soluzione efficace per commutare i motori BLDC, i sensori Hall rispondono solo alla metà delle esigenze di un sistema BLDC.
{kind=link}
Circuito driver ponte trifase
I sensori ad effetto Hall consentono a un controller di pilotare un motore BLDC, ma sfortunatamente i suoi controlli sono limitati alla velocità e alla direzione. Con un motore trifase, i sensori a effetto Hall possono fornire solo la posizione angolare all’interno di ogni ciclo elettrico. Con l’aumentare del numero di coppie di poli, il numero di cicli elettrici incrementa per rivoluzione meccanica e, man mano che l’uso dei BLDC diventa più comune, aumenta anche la necessità di un rilevamento accurato della posizione. Per garantire una soluzione robusta e completa, il sistema BLDC dovrebbe fornire informazioni di posizione in tempo reale, affinché il controller possa tracciare non solo la velocità e la direzione, ma anche la distanza percorsa e la posizione angolare.
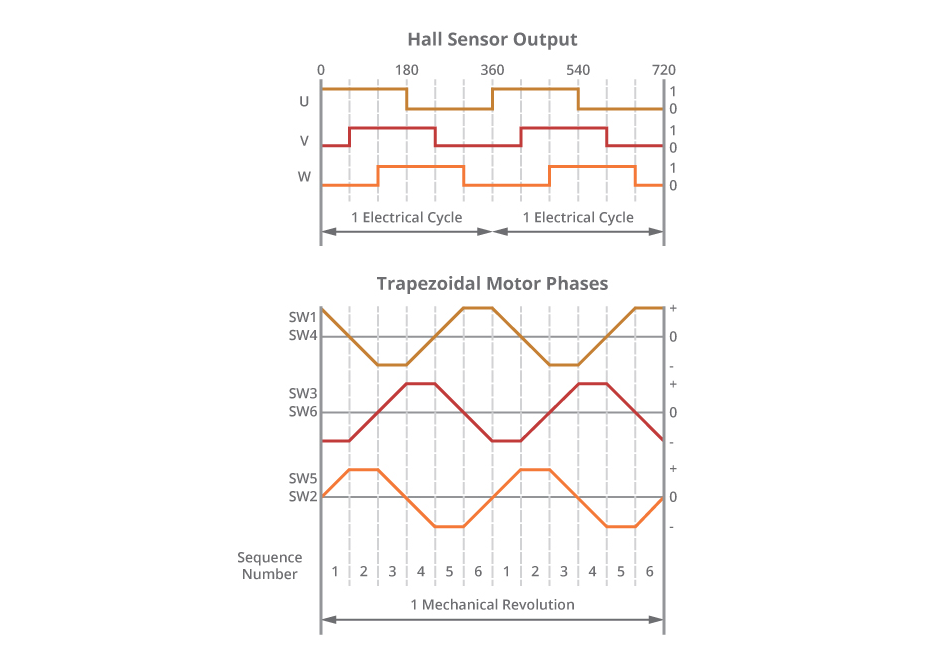
La soluzione più comune per soddisfare la necessità di informazioni sulla posizione più precise è stata quella di aggiungere un encoder rotativo incrementale al motore BLDC. Gli encoder incrementali vengono spesso aggiunti in aggiunta ai sensori a effetto Hall all’interno dello stesso sistema ad anello di retroazione. I sensori Hall vengono utilizzati per la commutazione del motore, mentre si fa ricorso all’encoder per tracciare posizione, rotazione, velocità e direzione con una precisione assai maggiore. Poiché i sensori Hall forniscono solo nuove informazioni sulla posizione a ogni cambiamento di stato, la loro precisione è limitata a sei stati per rivoluzione elettrica; per un motore a due poli, ciò si traduce in soli sei stati per rivoluzione meccanica. Rispetto agli encoder incrementali che offrono risoluzioni nell’ordine di migliaia di PPR (impulsi per rivoluzione), che possono quindi essere decodificati in un numero di cambiamenti di stato quattro volte superiore, diventa ovvio il motivo per cui entrambi siano necessari.
{kind=link}
Uscite a effetto Hall in sei fasi e fasi trapezoidali
In ogni caso, dal momento che i produttori di motori devono predisporre i propri motori sia di sensori a effetto Hall sia di encoder incrementali, molti produttori di encoder hanno iniziato a commercializzare encoder incrementali con uscite di commutazione, spesso chiamati semplicemente encoder di commutazione. Tali encoder sono progettati per fornire i loro canali tradizionali in quadratura A e B (e talvolta un canale di impulsi di indice Z una volta per giro) unitamente ai segnali di commutazione standard U, V e W richiesti dalla maggior parte dei driver per motori BLDC. Ciò evita ai progettisti di motori il passaggio dell’installazione di entrambi i sensori a effetto Hall e di un encoder incrementale.
Sebbene i vantaggi di questo approccio siano convincenti, esiste un compromesso significativo in relazione a questo metodo. Come notato in precedenza, affinché un motore BLDC possa essere commutato in modo efficiente, è essenziale che le posizioni del rotore e dello statore siano note. Ciò significa che è necessario prestare molta attenzione per garantire che i canali U/V/W dell’encoder di commutazione siano correttamente allineati alle fasi del motore BLDC.
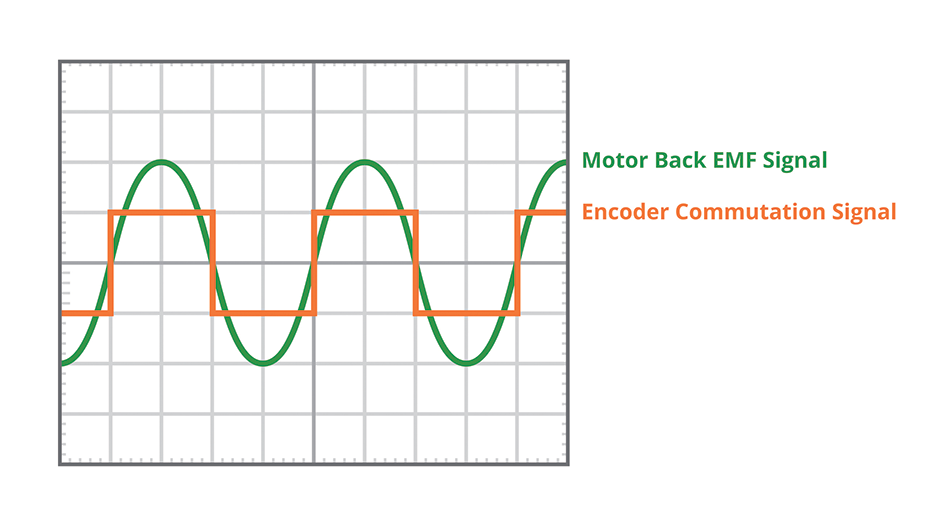
Per gli encoder ottici che hanno schemi fissi sui loro dischi ottici e sensori a effetto Hall che devono essere posizionati manualmente, il processo per ottenere il corretto allineamento di un motore BLDC è sia ripetitivo che dispendioso in termini di tempo. Il metodo prevede apparecchiature aggiuntive tra cui un secondo motore e un oscilloscopio. Per allineare un encoder ottico o un insieme di sensori a effetto Hall, il motore BLDC deve essere retroazionato con un secondo motore; quindi, mentre il motore viene fatto ruotare a velocità costante dal secondo motore, viene utilizzato un oscilloscopio per monitorare la forza controelettromotrice (nota anche come forza elettromotrice di ritorno o back-EMF) delle tre fasi del motore.
I segnali U/V/W risultanti dai sensori encoder o Hall devono essere confrontati con la forma d’onda della forza controelettromotrice mostrata sull’oscilloscopio. Se si manifestano variazioni tra i canali U/V/W e la forma d’onda della forza controelettromotrice, è necessario procedere a una regolazione. Questo processo può richiedere fino a 20 minuti per motore, rende indispensabile la presenza di ampie strutture di laboratorio ed è una delle principali fonti di frustrazione in relazione all’utilizzo di motori BLDC.
Sebbene gli encoder di commutazione ottica consentano di avvalersi di un’unica tecnologia, il rovescio della medaglia dell’implementazione di un encoder di commutazione ottica è la sua mancanza di versatilità. Poiché gli encoder ottici utilizzano schemi fissi sui loro dischi ottici, prima dell’ordine è necessario conoscere il numero dei poli del motore, la risoluzione della quadratura e le dimensioni dell’albero del motore.
{kind=link}
Allineamento desiderato dei canali di commutazione e delle fasi del motore
Encoder di commutazione capacitivi
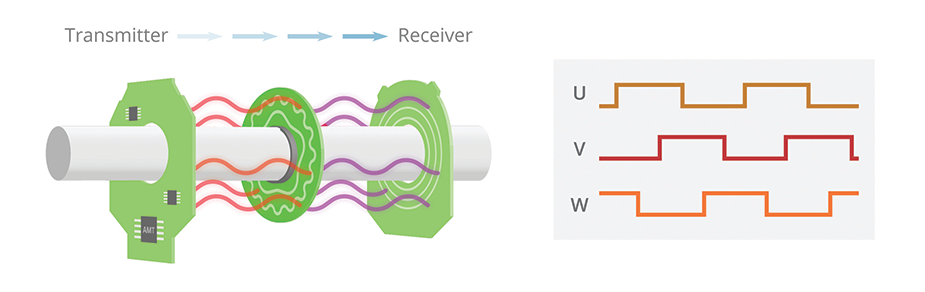
CUI Devices ha risolto entrambi i problemi offrendo un encoder di commutazione avanzato basato sulla tecnologia capacitiva brevettata utilizzata nella famiglia di prodotti AMT. I codificatori ottici utilizzano LED molto piccoli per trasmettere la luce attraverso un disco con tacche a intervalli specifici per generare schemi di uscita. Gli encoder AMT possono essere descritti in modo simile, ma anziché trasmettere luce tramite LED, viene trasmesso un campo elettrico. Al posto di un disco ottico è presente un rotore PCB contenente una traccia metallica a schema sinusoidale che modula il campo elettrico. L’estremità di ricezione del segnale modulato viene quindi ritrasmessa al trasmettitore dove viene confrontata con l’originale tramite un ASIC proprietario. Questa tecnologia utilizza lo stesso principio del calibro digitale Vernier, nota per la sua affidabilità e precisione.
{kind=link}
Funzionamento encoder capacitivo
Gli encoder di commutazione serie AMT31 e AMT33 offrono uscite incrementali A/B/Z, nonché uscite di commutazione U/V/W. Dotati di ASIC capacitivo e MCU integrato, i codificatori generano le loro uscite in modo digitale. Ciò è significativo perché consente all’utente di impostare digitalmente la posizione zero dell’encoder con la semplice pressione di un pulsante. È sufficiente bloccare il motore BLDC nello stato di fase desiderato e azzerare gli encoder di commutazione AMT con il modulo AMT One Touch Zero™ o la GUI di programmazione AMT Viewpoint™. Ciò elimina la necessità di retroazionare il motore o di visualizzare uno qualsiasi dei segnali di uscita con l’oscilloscopio, riducendo di 20 minuti il processo di assemblaggio.
E grazie alla tecnologia capacitiva, la risoluzione della quadratura e le uscite di commutazione possono essere regolate dinamicamente. Agli utenti è semplicemente richiesto di collegare l’encoder AMT31 o AMT33 alla GUI AMT Viewpoint, selezionare da un elenco di 20 risoluzioni della quadratura (fino a 4096 PPR) e 7 opzioni di coppie di poli standard (fino a 20 poli) e premere “Programma”. Ciò presenta vantaggi nello sviluppo, consentendo agli ingegneri di apportare modifiche ai prototipi in modo rapido e semplice, e aiuta anche la gestione della catena di approvvigionamento della produzione, poiché permette di utilizzare una singola unità di stoccaggio (SKU) per più controlli del motore di diverse risoluzioni e conteggi dei poli BLDC. Oltre a ciascuna unità che supporta più risoluzioni e conteggi di coppie di poli, l’alloggiamento dell’encoder è progettato per un facile assemblaggio, offrendo diverse opzioni di montaggio e diverse dimensioni del manicotto per adattarsi ai diametri degli alberi motore comunemente utilizzati.
La GUI AMT Viewpoint offre anche un livello di supporto progettuale senza precedenti per gli encoder delle serie AMT31 e AMT33. Quando sono collegati a AMT Viewpoint, i dati diagnostici degli encoder AMT possono essere scaricati e utilizzati per evitare potenziali guasti e tempi di inattività sul campo.
Conclusioni
Un ciclo di controllo stretto con elevata precisione consente ai BLDC di eccellere in molte aree. Maggiore precisione significa meno spreco di energia, maggiore precisione e maggiore controllo da parte dell’utente finale sul funzionamento del BLDC. I motori BLDC sono attualmente in fase di implementazione in una vasta gamma di applicazioni connesse alla robotica chirurgica, alle automobili senza conducente e all’automazione della catena di montaggio e presto troveranno il loro posto in molti altri campi non ancora concepiti. Man mano che il mercato dei motori BLDC cresce, i requisiti rimangono gli stessi: motori robusti ed efficienti che offrono un feedback di rilevamento della posizione a basso costo e ad alta precisione. Se abbinati a un motore BLDC, gli encoder delle serie AMT31 e AMT33 permettono di risparmiare tempo durante l’installazione, semplificando al contempo lo sviluppo e la produzione. Grazie alla loro elevata versatilità, alla possibilità di essere programmati e azzerati in pochi secondi e alla loro compatibilità con la GUI AMT Viewpoint, gli encoder di commutazione AMT di CUI Devices sono ben allineati per soddisfare le esigenze del mercato BLDC, attualmente in rapida crescita.