I circuiti raddrizzatori a diodi sono ampiamente utilizzati nella progettazione elettronica, in particolare nei sistemi di alimentazione e di demodulazione. L’obiettivo principale è la conversione del segnale AC in DC, che può essere realizzata con diverse configurazioni circuitali, ognuna con i loro vantaggi e svantaggi, impiegati in vari settori industriali.
{kind=link}
I circuiti raddrizzatori sono classificati in due gruppi principali: monofase e trifase. La maggior parte dei raddrizzatori a bassa potenza per apparecchi domestici è monofase, i circuiti trifase sono molto importanti per applicazioni industriali e per la trasmissione di energia in corrente continua (HVDC).
Il circuito raddrizzatore a mezza onda è la forma più semplice che utilizza un solo diodo bloccando metà dell’interno ciclo del segnale alternato. Per la maggior parte delle applicazioni di potenza, questo tipo di circuito non è sufficiente in quanto il contenuto armonico della forma d’onda di uscita del raddrizzatore è molto grande e conseguentemente difficile da filtrare. Tuttavia, è un modo molto semplice per ridurre la potenza a un carico resistivo (Fig. 1)
{kind=link}
Il circuito raddrizzatore a onda intera, invece, utilizza entrambe le metà della forma d’onda. Ciò rende questa forma di raddrizzatore più efficace, e vi è la conduzione su entrambe le metà del ciclo della sinusoide, lo smoothing (letteralmente “stendere il segnale”, ovvero trasformare il segnale AC in DC) diventa molto più facile e più efficace. La tipologia circuitale classica utilizza quattro diodi in una topologia ponte. Circuiti raddrizzatori sincroni, inoltre, utilizzano elementi attivi invece di diodi per fornire la commutazione. Questo supera le perdite relative al diodo e migliora in modo significativo i livelli di efficienza.
La scelta dei circuito dipende dall’applicazione. Mentre i circuiti ad onda intera sono maggiormente utilizzati con la configurazione a ponte, circuiti a semionda possono offrire una soluzione migliore in alcune circostanze.
{kind=link}
Per applicazioni di potenza sono normalmente utilizzati diodi di potenza Schottky che richiede solo una tensione diretta di circa 0,2 – 0.3V per conduzione diretta. Ciò è particolarmente utile quando rileva piccoli segnali radio e quando viene utilizzato come un raddrizzatore di potenza dove le perdite sono notevolmente ridotte.
Circuito raddrizzatore a ponte
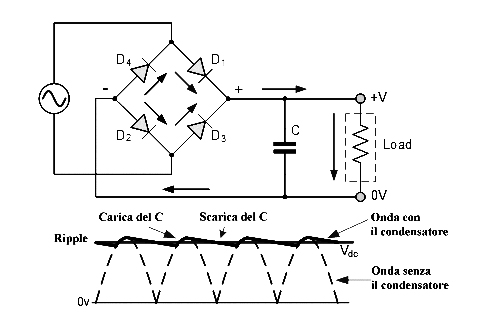
Il raddrizzatore a ponte (monofase) utilizza quattro diodi raddrizzatori singoli collegati in una configurazione chiusa ad anello (“ponte”) per produrre l’uscita desiderata. Il vantaggio principale di questo circuito a ponte è che non richiede un trasformatore duale, riducendo così le dimensioni e il costo (Fig. 3).
I quattro diodi etichettati da D1 a D4 sono disposti in serie, solo due diodi conducono corrente durante ogni semiciclo della sinusoide. Durante il semiciclo positivo, diodi D1 e D2 sono in conduzione, mentre i diodi D3 e D4 sono polarizzati inversamente e la corrente fluisce attraverso il carico come mostrato in figura 3. Viceversa durante il semiciclo negativo.
{kind=link}
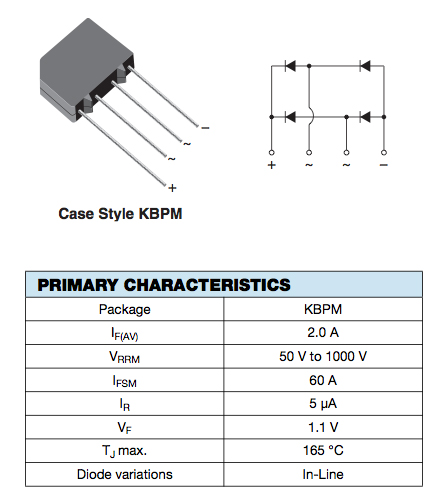
Anche se siamo in grado di utilizzare quattro diodi di potenza individuali per fare un raddrizzatore a ponte, componenti raddrizzatori a ponte integrati sono disponibili in una gamma di diverse tensioni e dimensioni che possono essere saldati direttamente in un circuito PCB (Fig. 4). A seconda della tecnologia del diodo la tensione di soglia di ciascuno può variare nell’intorno dei 0,6V.
Diversi parametri del dispositivo di base dovrebbero essere considerati, per esempio la tensione ripetitiva di picco (VRRM): il valore istantaneo massimo consentito di tensione inversa sul diodo raddrizzatore; e la Reverse Recovery Time (trr): in termini generali, una misura del tempo necessario per un diodo raddrizzatore di raggiungere uno stato di completo bloccaggio quando è applicata una polarizzazione inversa. Idealmente, questo tempo dovrebbe essere zero.
Il condensatore di smoothing posto in uscita (Fig. 3) converte l’onda in una tensione continua. Generalmente per circuiti di alimentazione in corrente continua il condensatore di livellamento è un elettrolitico che ha un valore di capacità dell’ordine dei 100 uF o più.
Tuttavia, due parametri importanti sono da considerare quando si sceglie un condensatore di livellamento, questi sono la sua tensione di funzionamento, che deve essere superiore al valore di uscita a vuoto del raddrizzatore, e il suo valore di capacità, che determina la quantità di ripple (parte variabile del segnale continuo) che sarà sovrapposta alla tensione DC. Un valore troppo basso della capacità del condensatore avrà uno scarso effetto sulla forma d’onda di uscita. Come regola generale, si può pensare di avere una tensione ripple inferiore a 100 mV picco-picco.
La massima tensione di ripple presente in un circuito raddrizzatore a onda intera è determinata non solo dal valore del condensatore di livellamento, ma anche dalla corrente di carico e frequenza, ed è calcolata come:
{kind=link}
dove Iload è la corrente di carico, f è la frequenza del ripple (quasi sempre il doppio della frequenza di linea 50 Hz) e C è la capacità del condensatore.
La quantità di tensione di ripple che si sovrappone alla tensione di alimentazione DC può essere virtualmente eliminata aggiungendo un filtro ai terminali di uscita del ponte raddrizzatore. Questo filtro di tipo passa-basso è costituito da due condensatori di livellamento, generalmente dello stesso valore e un’induttanza al fine di indurre un percorso di alta impedenza per la componente di ripple alternata.
{kind=link}
Un’altra alternativa più pratica ed economica è quella di utilizzare un regolatore di tensione, quale un LM78xx (dove “xx” sta per la tensione di uscita) per una tensione di uscita positiva o il suo inverso equivalente LM79xx per una tensione negativa di uscita, che può ridurre il ripple di oltre 70 dB offrendo allo stesso tempo una corrente di uscita costante di oltre 1A (Fig. 5).
Considerazioni progettuali
Un aspetto importante dei circuiti raddrizzatori è la perdita della tensione di uscita di picco, causata dalla caduta di tensione dei diodi (circa 0,6V per quelli al silicio e 0,3V per i diodi Schottky). Il circuito raddrizzatore a ponte ha una perdita di tensione dovuta a due diodi. Ciò riduce la tensione di uscita limitando, quindi, quella disponibile. La perdita di tensione è molto importante per i raddrizzatori a bassa tensione (ad esempio, 12V o meno), ma è insignificante in applicazioni ad alta tensione come HVDC.
{kind=link}
I raddrizzatori sono anche utilizzati per il rilevamento del segnale modulato in ampiezza relativamente ai segnali radio. Il segnale può essere amplificato prima della rilevazione; in caso contrario, devono essere usati diodi a bassa caduta di tensione o un diodo polarizzato con una tensione fissa. Un altro tipico impiego dei circuiti raddrizzatore è nella progettazione degli alimentatori. Un alimentatore può essere suddiviso in una serie di blocchi (Fig. 6), ciascuno dei quali svolge una funzione particolare: un trasformatore e un circuito raddrizzatore per convertire il segnale AC in DC.
Gli alimentatori sono progettati al fine di produrre meno ripple che può causare diversi problemi. Per esempio: in amplificatori audio, troppa ondulazione si presenta come un fastidioso ronzio udibile; in circuiti video, un ripple eccessivo determina difetti nell’immagine; in circuiti digitali può causare risultati errati di circuiti logici.
Diodo zener come regolatore di tensione
I diodi zener sono ampiamente utilizzati in polarizzazione inversa per produrre una tensione di uscita stabilizzata. Quando è collegato in parallelo a un generatore di tensione variabile in polarizzazione inversa, come ad esempio il circuiti raddrizzatore a diodo appena discusso, il diodo zener conduce quando la tensione raggiunge la sua tensione di rottura inversa.
{kind=link}
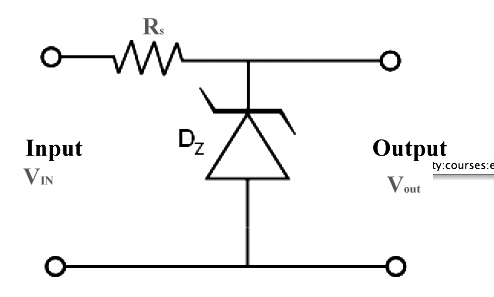
Da quel momento in poi, la relativa bassa impedenza del diodo mantiene la tensione ai suoi capi costante. Nel circuito illustrato in figura 7, una tensione di ingresso VIN, è regolata fino ad una tensione di uscita VOUT stabile. La tensione di breakdown di polarizzazione inversa del diodo DZ è stabile in un ampio intervallo di corrente e tiene VOUT relativamente costante anche se la tensione di ingresso può oscillare su una gamma piuttosto ampia. A causa della bassa impedenza del diodo, il resistore in serie RS è utilizzato per limitare la corrente attraverso il circuito.
Il valore di RS deve soddisfare due condizioni: deve essere abbastanza piccolo affinché la corrente attraverso il diodo zener sia sufficiente da mantenere la condizioni di reverse breakdown; inoltre, deve essere abbastanza grande affinché la corrente attraverso DZ sia inferiore a quella massima nominale.
Un piccolo problema con circuiti stabilizzatori a diodi zener è la presenza di disturbi elettrici a causa del tentativo di stabilizzare la tensione. Normalmente questo non è un problema per la maggior parte delle applicazioni, ma l’aggiunta di un condensatore di grande capacità di disaccoppiamento attraverso l’uscita del zener può essere necessaria per ottenere una ulteriore stabilizzazione della tensione.