Alimentazione: alcuni suggerimenti (parte 39) – Straordinaria efficienza con convertitori sincroni
-

- Tweet
- Pin It
- Condividi per email
-
Vi è mai stato chiesto di progettare un’alimentatore in grado di fornire buoni tempi di risposta ai transitori in caso di carichi leggeri? Se sì, e se avete consentito all’alimentazione di funzionare in modalità discontinua, avrete probabilmente scoperto che con carichi leggeri il guadagno nel ciclo di controllo decresce rapidamente. Questo decremento può causare tempi di risposta ai transitori insoddisfacenti e richiedere un condensatore-filtro di uscita di grandi dimensioni. Un approccio più semplice consiste nel rendere l’alimentazione continua per tutti i carichi.

Fig. 1 – Un semplice buck viene utilizzato per mostrare i tempi di risposta ai transitori
Nella figura 1 è illustrato un semplice convertitore buck sincrono. La figura è utile per esaminare i tempi di risposta ai transitori del carico che si ottengono con una corrente continua e quelli che vengono generati con una corrente discontinua nell’induttore di uscita. Nell’induttore di uscita la corrente rimane continua anche senza carico perché il convertitore sincrono consente alla corrente dell’induttore di fluire nella direzione opposta in caso di carichi pesanti. Questo circuito è stato costruito in modo da entrare in modalità discontinua tramite la semplice sostituzione del FET inferiore (Q2) con un diodo. In questo articolo le differenze vengono mostrate in relazione a una topologia buck, ma i tempi di risposta sono simili in tutte le topologie di alimentazione.
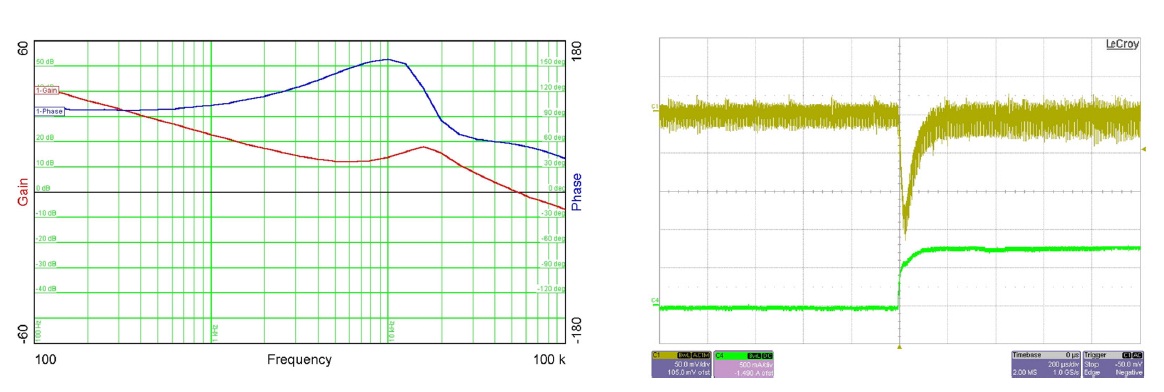
Fig. 2 – Il funzionamento sincrono (a sinistra) fornisce tempi di risposta ai transitori più soddisfacenti
Nella figura 2 vengono indicati due tempi di risposta ai carichi transitori in corrispondenza di una variazione graduale di 700 mA nella corrente di uscita. La traccia a sinistra rappresenta il caso in cui l’alimentazione è continua, mentre la traccia a destra illustra il caso in cui l’alimentazione è discontinua. In quest’ultimo caso, i tempi di risposta ai transitori sono tre volte peggiori rispetto a quelli che si registrano quando l’alimentazione è continua. Per forzare la modalità continua, è stato utilizzato un FET sincrono. Ad ogni modo, sono disponibili mezzi alternativi per ottenere tempi di risposta ai transitori soddisfacenti. È ad esempio possibile precaricare l’uscita oppure utilizzare induttori a oscillazione. Un induttore a oscillazione è progettato in modo che la relativa induttanza cresca a bassa corrente. Allo scopo, vengono principalmente utilizzati due materiali per il core: uno con un elevato contenuto di ferrite, che satura a basse correnti, e uno in ferro in polvere, che non satura.

Fig. 3 – Durante il funzionamento discontinuo, si perde una significativa porzione del guadagno del ciclo (a destra)
Durante il funzionamento discontinuo, i tempi di risposta ai transitori peggiorano perché le caratteristiche del ciclo subiscono drastiche variazioni. La figura 3 fornisce un’illustrazione al riguardo. La curva a sinistra indica il guadagno del ciclo durante il funzionamento continuo. Il ciclo di controllo presenta una larghezza di banda di 50 kHz e incrocia il margine di fase a 60 gradi. La curva a destra indica i tempi di risposta che si hanno quando lo stadio di potenza entra in modalità discontinua. Dal funzionamento continuo al funzionamento discontinuo, lo stadio di potenza cambia da una coppia di poli complessi a un singolo polo reale in bassa frequenza. La frequenza di questo polo è impostata dal condensatore di uscita e dal resistore di carico. È possibile osservare che, a causa del polo in bassa frequenza, la fase passa a una frequenza più bassa rispetto a quella del funzionamento continuo. Il guadagno si riduce significativamente a frequenze più basse perché il polo viene a trovarsi a una frequenza di crossover molto più ridotta, con un conseguente deterioramento dei tempi di risposta ai transitori.
Per riepilogare, l’impiego di un covertitore sincrono migliora l’efficienza e contribuisce in misura determinante alla regolazione del carico transitorio. Rappresenta un’alternativa altamente efficace al precaricamento di un’alimentazione. Inoltre, rispetto agli induttori a oscillazione, fa sì che le caratteristiche del ciclo di controllo si mantengano più costanti. Infine, migliora la dinamica di una topologia buck tradizionale nonché di tutte le topologie in cui è possibile utilizzare una rettificazione sincrona.
Nel prossimo articolo si tratterà il rumore di modo comune in un’alimentazione non isolata.
Per ulteriori informazioni su questa e altre soluzioni per gli alimentatori, visitare: http://www.ti.com/power-ca
Per contattare Robert Kollman: powertips@list.ti.com
Leggi tutti i corsi
Robert Kollman, Texas Instruments
Contenuti correlati
-
 Progettazione di un circuito di precarica attiva con condensatore DC-Link ad alta tensione
Progettazione di un circuito di precarica attiva con condensatore DC-Link ad alta tensioneQuesto articolo presenta il processo di progettazione necessario per calcolare gli adeguati valori dei componenti che contribuiscono a ottenere il profilo di carica desiderato Leggi l’articolo completo su EO 521
-
 I miglioramenti nella tecnologia RFID danno origine a nuove applicazioni
I miglioramenti nella tecnologia RFID danno origine a nuove applicazioniL’identificazione a radiofrequenza (RFID) è una tecnologia consolidata che viene impiegata da molti anni, con l’introduzione dei primi esempi di transponder RF passivi che risale agli anni 70. Probabilmente la usate tutti i giorni senza accorgervene, ma...
-
 TI presenta i suoi nuovi PLD
TI presenta i suoi nuovi PLDTexas Instruments (TI) ha presentato nuovi dispositivi a logica programmabile (PLD) che permettono di semplificare e velocizzare lo sviluppo di progetti di dispositivi logici per qualsiasi tipo di applicazione. È possibile integrare fino a 40 combinazioni e...
-
 Come migliorare la sicurezza negli inverter di trazione dei veicoli elettrici
Come migliorare la sicurezza negli inverter di trazione dei veicoli elettriciI progettisti di veicoli elettrici possono aumentare la sicurezza e l’affidabilità dei sistemi a inverter di trazione monitorando la soglia di tensione del gate Leggi l’articolo completo su EO520
-
 Finanziamenti per 1,6 miliardi per Texas Instruments
Finanziamenti per 1,6 miliardi per Texas InstrumentsTexas Instruments (TI) ha firmato un memorandum d’intesa preliminare non vincolante con il Dipartimento del Commercio degli Stati Uniti per un finanziamento diretto fino a 1,6 miliardi di dollari. Questa operazione rientra nell’ambito del CHIPS and Science...
-
 Un processore con LPDDR4 integrata accelera lo sviluppo di applicazioni
Un processore con LPDDR4 integrata accelera lo sviluppo di applicazioniIl System-in-Package rappresenta una valida scelta di progettazione e può essere determinante per lo sviluppo di svariate applicazioni e dispositivi di tipo general purpose, nonché per soluzioni compatte e ad alte prestazioni Leggi l’articolo completo su EO519
-
 I vantaggi dell’analogico e del digitale per la soluzione LogiCoA di ROHM
I vantaggi dell’analogico e del digitale per la soluzione LogiCoA di ROHMROHM ha creato LogiCoA, una innovativa soluzione di alimentazione per apparecchiature industriali e consumer di piccola e media potenza (da 30 W a 1 kW) che fornisce le stesse funzionalità degli alimentatori con controllo completamente digitale a...
-
 Progettazione di un’applicazione per supportare ampi intervalli di tensione di ingresso e della batteria
Progettazione di un’applicazione per supportare ampi intervalli di tensione di ingresso e della batteriaOltre a contribuire a ridurre i tempi di progetto, l’utilizzo di un caricabatterie ad ampio VIN e ampia VOUT permette di valutare nuove tecnologie, come la ricarica bidirezionale a energia solare Leggi l’articolo completo su EO519
-
 Texas Instruments e Delta Electronics insieme per le soluzioni per EV
Texas Instruments e Delta Electronics insieme per le soluzioni per EVTexas Instruments (TI) ha stretto una collaborazione a lungo termine con Delta Electronics per creare soluzioni di ricarica di bordo e alimentazione di nuova generazione per veicoli elettrici (EV). Questa collaborazione sfrutterà le capacità di ricerca e...
-
 Realizzare telecamere smart basate sull’AI con un processore “ad hoc”
Realizzare telecamere smart basate sull’AI con un processore “ad hoc”Il processore AM62A è progettato per applicazioni di visione da bassa a media che richiedono una o due telecamere. Grazie al suo innovativo acceleratore per AI, all’encoder/decoder H264/H265 e al processore ISP (Image Sensor Processor) integrato dotato...
Scopri le novità scelte per te
-
Progettazione di un circuito di precarica attiva con condensatore DC-Link ad alta tensione
Questo articolo presenta il processo di progettazione necessario per calcolare gli adeguati valori dei componenti che contribuiscono...
-
I miglioramenti nella tecnologia RFID danno origine a nuove applicazioni
L’identificazione a radiofrequenza (RFID) è una tecnologia consolidata che viene impiegata da molti anni, con l’introduzione dei...

News/Analysis Tutti ▶
-
 Premi per le piattaforme Edge AI di Advantech
Premi per le piattaforme Edge AI di AdvantechAdvantech ha annunciato che le sue piattaforme MIC-732-AO, UNO-148 V2, MIC-770 V3 + MIC-75GF10...
-
 I consigli di Cisco per il Black Friday e oltre
I consigli di Cisco per il Black Friday e oltreCisco avvisa sui possibili rischi per la sicurezza legati alle feste natalizie, Black Friday,...
-
 Lauterbach e Kernkonzept semplificano lo sviluppo di sistemi RISC-V
Lauterbach e Kernkonzept semplificano lo sviluppo di sistemi RISC-VLauterbach e Kernkonzept stanno collaborando per consentire lo sviluppo e i test sulle future...
Products Tutti ▶
-
 Murata amplia la sua offerta di alimentatori
Murata amplia la sua offerta di alimentatoriMurata ha aggiunto il modello PQC600 alla sua gamma di alimentatori AC/DC di tipo...
-
 Melexis presenta un sensore di corrente coreless
Melexis presenta un sensore di corrente corelessMLX91235 è un sensore di corrente di Melexis che elimina la necessità di un...
-
 Nuovi connettori USB 2.0 Type C da Same Sky
Nuovi connettori USB 2.0 Type C da Same SkyL’ Interconnect Group di Same Sky ha annunciato l’espansione della sua linea di connettori...

